A nonlinear semigroup approach to Hamilton-Jacobi equations–revisited
Abstract
We consider the Hamilton-Jacobi equation
where is a connected, closed and smooth Riemannian manifold. The functions and are continuous. is convex, coercive with respect to , and changes the signs. The first breakthrough to this model was achieved by Jin-Yan-Zhao [11] under the Tonelli conditions. In this paper, we consider more detailed structure of the viscosity solution set and large time behavior of the viscosity solution on the Cauchy problem.
Keywords. Hamilton-Jacobi equations, viscosity solutions, weak KAM theory
Lin Wang: School of Mathematics and Statistics, Beijing Institute of Technology, Beijing 100081, China; e-mail: [email protected] ††Mathematics Subject Classification (2020): 37J50; 35F21; 35D40
1 Introduction and main results
Inspired by Aubry-Mather theory and weak KAM theory for classical Hamiltonian systems, an action minimizing method for contact Hamiltonian systems was developed in a series of papers [16, 17, 18, 19, 20]. Let be a contact Hamiltonian. It turns out that the dependence of on the contact variable plays a crucial role in exploiting the dynamics generated by . By using previous dynamical approaches, some progress on viscosity solutions of Hamilton-Jacobi (HJ) equations have been achieved [16, 18, 20]. In particular, the structure of the set of solutions can be sketched if is uniformly Lipschitz in based on the works mentioned before. Shortly after [18] occurred, [12] generalized the results to ergodic problems by using PDE approachs. More recently, for a class of HJ equations with non-monotone dependence on , the first breakthrough was achieved by Jin-Yan-Zhao [11] under the Tonelli conditions. In that work, they provided a description of the solution set of the stationary equation (formulated as (E0) below) and revealed a bifurcation phenomenon with respect to the value in the right hand side, which opened a way to exploit further properties of viscosity solutions beyond well-posedness for HJ equations with non-monotone dependence on . The main results in this paper are motivated by [11].
Let us consider the stationary equation:
| (E0) |
Throughout this paper, we assume is a closed, connected and smooth Riemannian manifold. denotes the spacial gradient with respect to . Denote by and the tangent bundle and cotangent bundle of respectively. Let satisfy
-
(C):
is continuous;
-
(CON):
is convex in , for any ;
-
(CER):
is coercive in , i.e. , where denotes the norms induced by on both and .
Correspondingly, one has the Lagrangian associated to :
where represents the canonical pairing between and . The Lagrangian satisfies the following properties:
-
(LSC):
is lower semicontinous in , and continuous on the interior of its domain ;
-
(CON):
is convex in , for any .
We also assume is continuous and satisfies
-
():
there exist such that and .
Throughout this paper, we define
| (1.1) |
where stands for the supremum norm of the functions on their domains. From an economical point of view, the assumption () may be corresponding to a model with fluctuating interest rates. To be more precise, the rates depend on the space variable and admit values above and below zero at some places. From a theoretical point of view, it is a toy model of the HJ equations with non-monotone dependence on . Based on this model, we revealed some different phenomena from the cases with monotone dependence on can be revealed.
Remark 1.1.
The model (E0) has been considered in [21]. In that paper, the function is non-negative and positive on the projected Aubry set of . In this case, the solution of (E0) is unique. The asymptotic behavior of the solution of (E0) is also studied in [21] when . When and the assumption () holds, the family of solutions of (E0) may diverge, one can refer to [13] for an example.
In [14], the well-posedness of the Lax-Oleinik semigroup was verified for contact HJ equations under very mild conditions. By virtue of that, we generalize the results in [11] to the cases from the Tonelli conditions to the assumptions (C), (CON) and (CER) above. Henceforth, for simplicity of notation, we omit the word “viscosity”, if it is not necessary to be mentioned.
Proposition 1.2 (Generalization of [11]).
The definition of is inspired by [5]. In light of that, is called the critical value. Now we consider the most general case
where the Hamiltonian is continuous, superlinear in and uniformly Lipschitz in . It was pointed out in [12] that there is a constant such that the above equation has viscosity solutions. Here we give some examples on the set of all such ’s, which reveals the essential difference between the monotone cases and the non-monotone cases:
-
•
for classical Tonelli Hamiltonian , the set . The number is called the effective Hamiltonian or the Mañé critical value;
-
•
for the discounted Hamilton-Jacobi equation, i.e., the Hamiltonian is of the form with , the set , see for example [6];
- •
-
•
for the Hamiltonian periodically depending on , i.e., , the set is a bounded closed interval, see [15].
Different from the Tonelli case considered in [11], some new ingredients are needed for a priori estimates of subsolutions under the assumptions (C), (CON) and (CER). Those estimates will be provided in Section 3. The remaining parts of the proof of Proposition 1.2 are similar to the one in [11]. We postpone it to Appendix A.3 for consistency.
Motivated by Proposition 1.2, we are devoted to exploiting more detailed information of this model. First of all, we obtain
Theorem 1.
Let . There exist the maximal element and the minimal element in the set of solutions of (E0).
Remark 1.3.
The viscosity solutions are equivalent to backward weak KAM solutions in our settings (see [14, Proposition D.4]). In terms of the correspondence between backward and forward weak KAM solutions (see Proposition 2.7 below), it follows from Theorem 1 that there exist the maximal and minimal forward weak KAM solutions of (E0). We denote (resp. ) the minimal (resp. maximal) froward weak KAM solution of (E0). By Proposition 2.8(3)(4), there hold
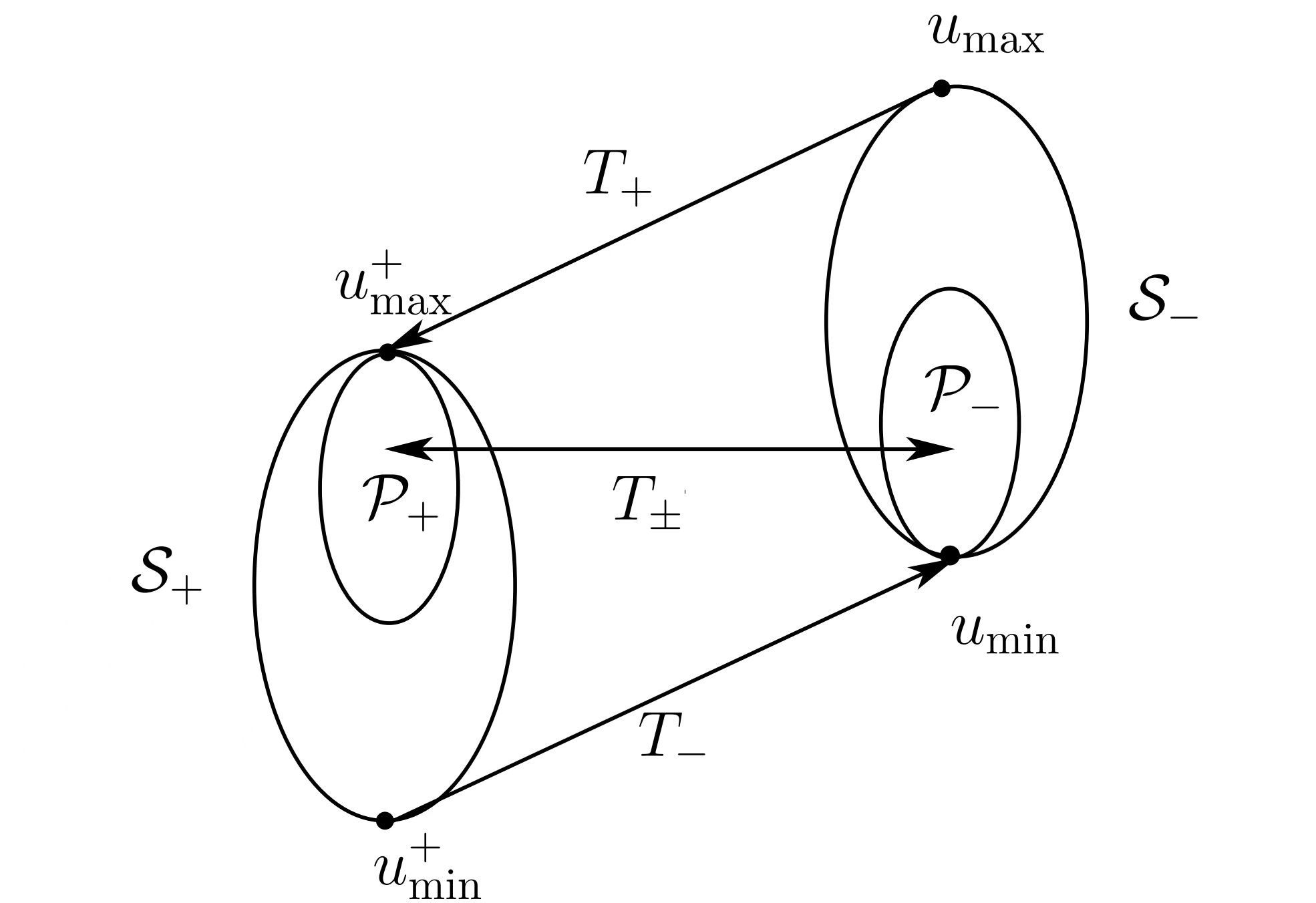
Let (resp. ) be the set of all backward (resp. forward) weak KAM solutions. Given , if
then (resp. ) is called a conjugated backward (resp. forward) weak KAM solution. See Figure 1 for a rough description of structure of the solution set of (E0) in general cases, where , and (resp. ) denotes the set of all conjugated backward (resp. forward) weak KAM solutions. For further statement on conjugated weak KAM solutions, one can refer to [10, Theorem 6.5 and Theorem 7.1].
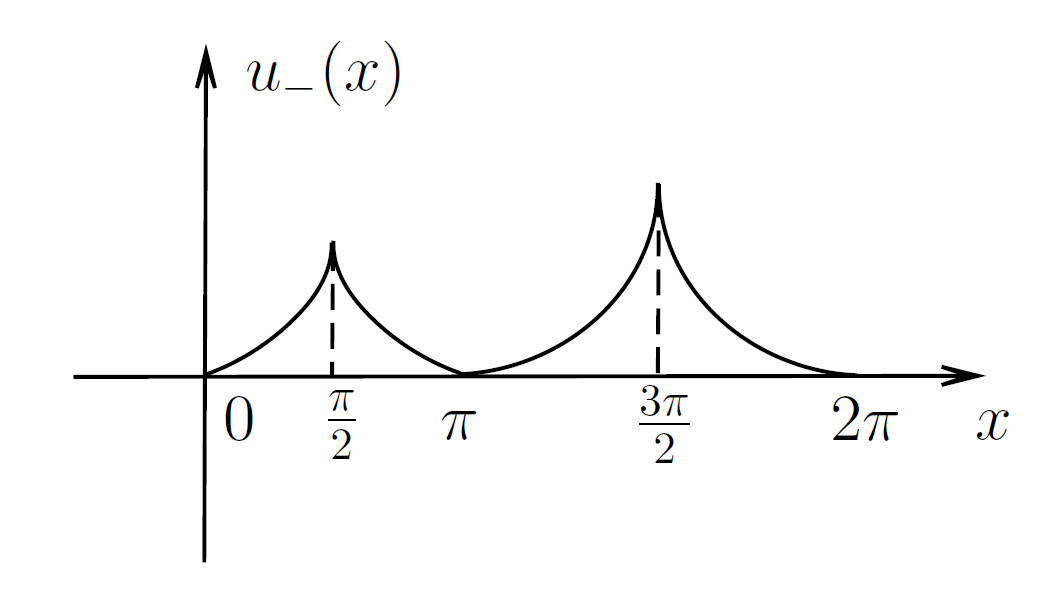
By Proposition 1.2(2), (E0) has at least two solutions if . Then a natural question is to figure out what happens if . In [11], Jin, Yan and Zhao considered the following example:
Example 1.4.
| (1.2) |
where denotes a flat circle with a fundamental domain .
It was shown that and there are uncountably many solutions of (1.2) in the critical case. A rough picture of certain solutions is given by Figure 2. See [11, Theorem 3.5] for more details.
As a complement, we consider
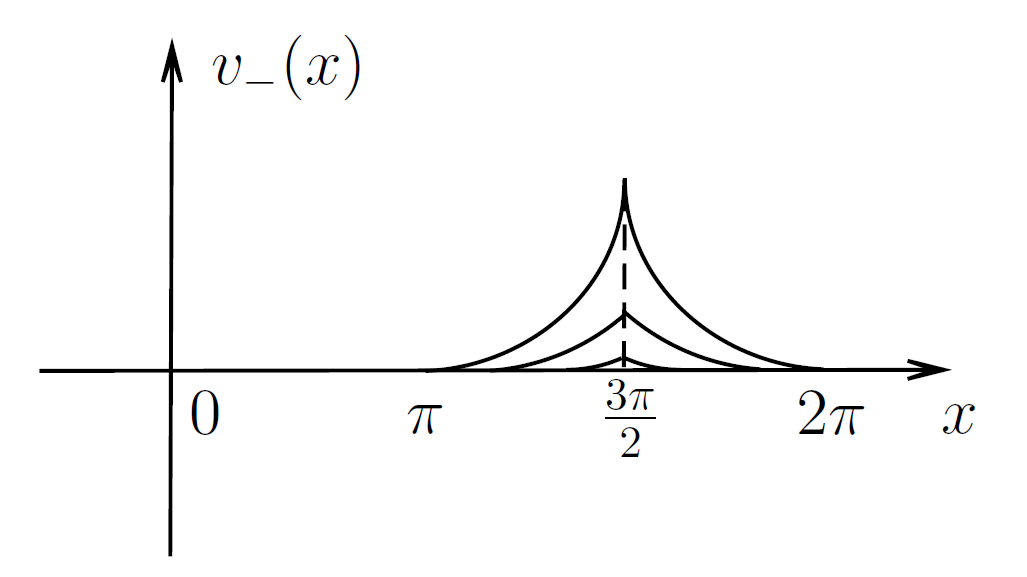
Example 1.5.
| (1.3) |
We will prove that the critical value is also , but (1.3) admits a unique solution in the critical case. A rough picture of the solution is given by Figure 3. See Remark 4.2 below for certain generalization of Example 1.5. Those two examples above show various possibilities about the solution set of (E0) in the critical case.
In the second part, we consider the evolutionary equation:
| (CP) |
where . It is well known that the viscosity solution of (CP) is unique (see [10, Corollary 3.2] for instance). By [14, Theorem 1], this solution can be represented by , where is defined implicitly by
| (T-) |
where the infimum is taken among absolutely continuous curves with .
In order to obtain equi-Lipschitz continuity of for a given , we have to strengthen the assumptions on from (CON), (CER) to the following:
-
()
is strictly convex in for any , and there is a superlinear function such that .
Under the assumption (), the equi-Lipschitz continuity of follows from the locally Lipschitz property and boundedness of on . From the weak KAM point of view, that kind of locally Lipschitz property can be verified by a standard procedure once we have the Lipschitz regularity of minimizers of (see [7, Lemma 4.6.3]). However, is only supposed to be continuous in our setting. Then one can not use the method of characteristics to improve regularity of these minimizers. Following [2], we will deal with that issue by using the method of energy estimates. A key ingredient of that method is to establish the Erdmann condition for a non-smooth energy function. More precisely, we obtain the following result, whose proof is given in Appendix A.4.
Proposition 1.6.
Assume () holds. If has a bound independent of , then the family is equi-Lipschitz continuous, where is an arbitrarily positive constant.
Let us recall denotes the maximal solution of (E0), and denotes its minimal froward weak KAM solution. By Remark 1.3, on . Both of them play an important role in characterizing the large time behavior of the solution of (CP). By assuming () holds, we obtain the following two results.
Theorem 2.
Let be the solution of (CP) with . Then
-
(1)
if the initial data , then converges to uniformly on as ;
-
(2)
if there is a point such that , then tends to uniformly on as .
Theorem 3.
Let be the solution of (CP) with . If the initial data , then converges to uniformly on as .
Remark 1.7.
For , if there exists such that , then may not converge to .
- •
- •
The rest of this paper is organized as follows. Section 2 gives some preliminaries on , weak KAM solutions and Aubry sets. In Section 3, a priori estimates on subsolutions of (E0) are established. The proof of Theorem 1 and a detailed analysis of Example 1.5 are given in Section 4. Theorem 2 and Theorem 3 are proved in Section 5 For the sake of completeness, some auxiliary results are proved in Appendix A.
2 Preliminaries
In this part, we collect some facts on , weak KAM solutions and Aubry sets. These facts hold under more general assumptions on the dependence of . Consider the evolutionary equation:
| (A0) |
and the stationary equation:
| (B0) |
We denote by a point in , where and . Let be a continuous Hamiltonian satisfying
-
(CON):
is convex in , for any ;
-
(CER):
is coercive in , i.e. ;
-
(LIP):
is Lipschitz in , uniformly with respect to , i.e., there exists such that , for all and all .
Correspondingly, one has the Lagrangian associated to :
Due to the absence of superlinearity of , the corresponding Lagrangian may take the value . Define
Then satisfies the following properties:
-
(LSC):
is lower semicontinuous, and continuous on the interior of ;
-
(CON):
is convex in , for any ;
-
(LIP):
is Lipschitz in , uniformly with respect to , i.e., there exists such that , for all and all .
Proposition 2.1.
[14, Theorem 1] Both backward Lax-Oleinik semigroup
| (2.1) |
and forward Lax-Oleinik semigroup
| (2.2) |
are well-defined for . The infimum (resp. supremum) is taken among absolutely continuous curves with (resp. ). If is continuous, then represents the unique continuous viscosity solution of (A0). If is Lipschitz continuous, then is also Lipschitz continuous on .
Proposition 2.2.
[14, Proposition 3.1] The Lax-Oleinik semigroups have the following properties
-
(1)
For and , if for all , we have and for all .
-
(2)
Given any and , we have and for all .
Following Fathi [7], one can extend the definitions of backward and forward weak KAM solutions of equation (B0) by using absolutely continuous calibrated curves instead of curves.
Definition 2.3.
A function is called a backward weak KAM solution of (B0) if
-
(1)
For each absolutely continuous curve , we have
The above condition reads that is dominated by and denoted by .
-
(2)
For each , there exists an absolutely continuous curve with such that
The curves satisfying the above equality are called -calibrated curves.
A forward weak KAM solution of (B0) can be defined in a similar manner. Similar to [19, Proposition 2.8], one has
Proposition 2.4.
Let . Then
| (2.3) |
where denote the Lax-Oleinik semigroups associated to .
The following two results are well known for Hamilton-Jacobi equations independent of . They are also true in contact cases. We will prove them in Appendixes A.1 and A.2. Proposition 2.5 provides some equivalent characterizations of Lipschitz subsolutions. Proposition 2.6 shows that is a ‘weak inverse’ of .
Proposition 2.5.
Let . The following conditions are equivalent:
-
(1)
is a Lipschitz subsolution of (B0);
-
(2)
;
-
(3)
for each ,
Proposition 2.6.
For each , we have for all .
The following three results come from [14], which give some connections among the fixed points of , the lower (resp. upper) half limit, backward (resp. forward) weak KAM solutions and Aubry sets.
Proposition 2.7.
[14, Proposition D.4] Let . The following statements are equivalent:
-
(1)
is a fixed point of ;
-
(2)
is a backward weak KAM solution of (B0);
-
(3)
is a viscosity solution of (B0).
Similarly, let . The following statements are equivalent:
-
(1’)
is a fixed point of ;
-
(2’)
is a forward weak KAM solution of (B0);
-
(3)’
is a viscosity solution of .
Proposition 2.8.
Proposition 2.9.
[14, Theorem 3] Let (resp. ) be a solution (resp. forward weak KAM solution) of (B0). We define the projected Aubry set with respect to by
Correspondingly, we define the projected Aubry set with respect to by
Both and are nonempty. In particular, if and , then
which is also denoted by , following the notation introduced by Fathi [7].
3 Some estimates on subsolutions
In this section, we assume the existence of subsolutions of (E0) and prove some a priori estimates on subsolutions. The existence of subsolutions will be verified for in Proposition A.6 below.
Let be the Legendre transformation of . Let be the Lax-Oleinik semigroups associated to
Similar to [9, Proposition 2.1], one can prove the local boundedness of in a neighborhood of the zero section of .
Lemma 3.1.
Let satisfy (C)(CON)(CER), there exist constants and such that the Lagrangian associated to satisfies
| (3.1) |
Throughout this paper, we define
| (3.2) |
where denotes the diameter of .
Lemma 3.2.
Let .
-
(1)
has an upper bound independent of ;
-
(2)
has a lower bound independent of .
Proof.
Take with . We first show
Otherwise, there is such that
There are two cases:
(i) For all , we have
Take the constant curve , we have
which also leads to a contradiction.
(ii) There is such that
and
Take the constant curve , we have
which leads to a contradiction.
We then prove that for all and all , is bounded from above. It suffices to prove that for all and , is bounded from above, where is given by (3.2). Let be a geodesic connecting and with constant speed, then . Let
Given . We assume . Otherwise the proof is completed. Since , there exists such that and for all . By definition
which implies
where is given by (1.1) and
where is given by (3.1). By the Gronwall inequality, we have
Take we have .
Similar to the argument above, by choosing constant curve with and replacing by , one has
| (3.3) |
This completes the proof. ∎
Corollary 3.3.
Let be a Lipschitz subsolution of (E0). Then (resp. ) has an upper (resp. lower) bound independent of and .
Proof.
We only prove has an upper bound independent of and . The case with is similar. Let
| (3.4) |
By (CER), is finite. By the definition of the subsolution, for any , where denotes the reachable gradients. It implies
Hence, for each subsolution , we have
Let
where is given by (1.1). Here we note that
By Lemma 3.2, we have
| (3.5) |
This completes the proof. ∎
Proposition 3.4.
There exists a constant such that for any subsolution of (E0), there holds
Proof.
For each , let be a geodesic of length with constant speed and connecting and , where denotes the distance between and induced by the Riemannian metric on . Then
By Proposition 2.5,
Note that is independent of the choice of the subsolution . We get the equi-Lipschitz continuity of by exchanging the role of and . ∎
Proposition 3.5.
Proof.
We only prove that exits, and it is a viscosity solution of (E0). The existence of is similar . By Proposition 2.8
is a solution of (E0). By Proposition 2.5(3) and Corollary 3.3, for a given , the limit exists. By definition, we have
Using Proposition 2.5(3) again, is increasing in for all , we have
Then . Note that is a solution of (E0). By the Dini theorem, the family uniformly converges to . ∎
4 Structure of the solution set of (E0)
Let (resp. ) be the set of all solutions (resp. forward weak KAM solution) of (E0).
4.1 The maximal solution
We first prove the existence of the maximal solution. Since each solution is a subsolution, by Proposition 3.4, there are and such that for all . Note that all solutions of (E0) are fixed points of . Take a continuous function as the initial data. By Proposition 2.2 (1), is larger than every solution of (E0). By Lemma 3.2(1), has an upper bound independent of . By Proposition 2.8 (1), the lower half limit
is a Lipschitz continuous viscosity solution of (E0). Since is larger than every solution of (E0), we have
for all . Thus, is the maximal solution of (E0).
4.2 The minimal solution
Since each forward weak KAM solution is dominated by , by Proposition 2.7, it is a subsolution of (E0). By Proposition 3.4, there are and such that for all . Take a continuous function as the initial data. By Proposition 2.2 (1), is smaller than every forward weak KAM solution of (E0). By Lemma 3.2(2), has a lower bound independent of . By Proposition 2.8 (2), the upper half limit
is a forward weak KAM solution of (E0). Since is smaller than every forward weak KAM solutions of (E0), we have
for all . Thus, is the minimal forward weak KAM solution of (E0). By Proposition 2.8 (4), exists, and it is a solution of (E0).
Lemma 4.1.
is the minimal solution of (E0).
Proof.
Define
We first prove that for each , there holds . In fact, by definition of , there is such that . Since is the minimal forward weak KAM solution, we have
Acting on both sides of the inequality above, and letting , we have .
We then prove that for each , still holds. Let and . Then , which implies . By Proposition 2.8 (3), . Then we have . Taking we get . Therefore, . ∎
So far, we complete the proof of Theorem 1.
4.3 On Example (1.5)
The Hamiltonian of (1.3) is formulated as
| (4.1) |
We first show . Assume (1.3) admits a smooth subsolution when , then we have , which is impossible. When , the constant function is a subsolution of (1.3). Therefore . By Proposition 3.5, there is a solution of (1.3) given by
Since , then .
We then divide the proof into the following steps:
-
•
In Step 1, we discuss the dynamical behavior of the contact Hamiltonian flow generated by , which is restricted on a two dimensional energy shell .
In Step 1.1, we show that the non-wandering set of consists of four fixed points;
In Step 1.2, we classify these fixed points by linearization;
In Step 1.3, we show that for each solution of (1.3), the -limit set of any -calibrated curve with and can only be or . We only focus on the projected -limit set defined on . For simplicity, we define
where is a -calibrated curve. Moreover, we check the constant curves are calibrated curves, which implies , .
-
•
In Step 2, we prove the uniqueness of the solution of (1.3).
In Step 2.1, we prove that is unique near and ;
In Step 2.2, we prove that is unique on by the comparison along calibrated curves via the Gronwall inequality. The uniqueness of on is guaranteed by the comparison principle for the Dirichlet problem.
Step 1. The dynamical behavior of the contact Hamiltonian flow.
For each solution of (1.3), let be a -calibrated curve. Similar to the analysis at the beginning of [11, Section 3.2], the derivative exists for each and the orbit satisfies the contact Hamilton equations generated by the Hamiltonian defined in (4.1). Then the proof of the uniqueness of the solution of (1.3) is related to the contact Hamiltonian flow generated by .
Since and for , we discuss the flow on the two dimensional energy shell
Note that along the contact Hamiltonian flow, we have , which equals to zero on the set . Thus, is an invariant set under the action of . Since we are interested in the orbit , we then consider the flow restrict on . The contact Hamilton equations then reduce to
| (4.2) |
Step 1.1. The non-wandering set. We first consider the non-wandering set of . Suppose there is an orbit belongs to . Since , equals to a constant and . By , also equals to a constant . By and , we have
By and we have
A direct calculation shows that the only non-wandering points are
Step 1.2. The classification of fixed points. We then consider the dynamical behavior of near the fixed points. After a translation, we put the fixed points to be the origin. Near the points and , the linearised equation of (4.2) is
Thus, and are hyperbolic fixed points for the dynamical system . Near the points and , the linearised equations of (4.2) are
and
respectively. Thus, is a stable focus, and is an unstable focus.
Step 1.3. The -limit set of calibrated curves. The -limit set of a -calibrated curve is contained in the projection of . If itself is not a fixed point, and the -limit of is a focus, then there are two constants with such that , which is impossible. In other words, the obits near a focus can not form a 1-graph. Thus, the -limit of with can only be either or . For constant curve with and equals to either or , we have
where
is the Lagrangian corresponding to . Then the constant curve is a -calibrated curve. We then have
and
Step 2. The uniqueness of the solution of (1.3).
Step 2.1. For , let with be a -calibrated curve. We claim that there is a constant such that for , the -limit of the calibrated curve is . If not, the -limit of is for all . Then is decreasing on , since is increasing along by the last equality of (4.2). By Step 1.3, , we get on , which is impossible. By similar arguments, we conclude that there is a constant such that the -limit of is for , and the -limit of is for . Shrink if necessary, the 1-graph coincides with the local unstable manifold of (resp. ) corresponding to the restricted flow when (resp. ). Therefore, the solution is unique on .
Step 2.2. Since for , by the uniqueness of the solution of the Dirichlet problem (cf. [4, Theorem 3.3]), is unique on . It remains to consider the uniqueness of for . Assume that there are two solutions and satisfying at some point . Let be a -calibrated curve with . Without any loss of generality, we assume the -limit of is . Take such that , and define
Then and . By continuity, there is such that and for all . By definition we have
and
which implies
By the Gronwall inequality, we have for all , which contradicts . The case is similar. By the continuity of at , we finally conclude that the solution is unique on .
Remark 4.2.
The method introduced in this section can be generalized to the following case
where and are of class and
-
(i)
the zero points of are and , and at and ;
-
(ii)
is strictly convex and superlinear in , ,
and the maximum is achieved at and , and the Hessian matrix of is negative definite at and ;
-
(iii)
for all , let with be a calibrated curve, then the -limit of is either or .
By (ii), , where the equality holds if and only if . By the argument at the beginning of this section, it is direct to see the critical value . Now let . The contact Hamilton equations for are
| (4.3) |
By (ii), and the equality holds if and only if . By the second equation in (4.3), there is only one non-wandering point of over (resp. )
Note that
Similar to Step 1.3 above, we have for each solution . Near the points and , the linearised equation is
By (ii), and are hyperbolic fixed points. By (iii) and , the solution is unique near and . The remaining proof is similar to Step 2.2 above, we omit it for brevity.
5 Large time behavior of the solution of (CP)
Let us recall (resp. ) be the maximal solution (resp. minimal forward weak KAM solution) of (E0). These two solutions play an important role in characterizing the large time behavior of the solution of (CP).
5.1 Above the maximal solution
Let . Then . Combining with Lemma 3.2(1), has a bound independent of . Then the pointwise limit
exists.
Assume () holds. By Proposition 1.6, the family is equi-Lipschitz in . We denote by the Lipschitz constant of in . Since
the limiting procedure
is uniform in . Thus, the function is Lipschitz continuous. We assert that is a subsolution. If the assertion is true, by Proposition 3.5, exits, and it is a solution. Since , we have . Thus, . Based on Section 4.1, the lower half limit . By the definition of , we have
On the other hand,
It follows that uniformly on .
It remains to prove is a subsolution. By Proposition 2.5, we only need to show is increasing in .
We claim that for every , there exists a constant independent of such that for any ,
Fixing , by definition of , for every , there is such that for any ,
Take . For , we have
Since is compact, there are finite points such that for each , there is a point such that . Let and the claim is proved.
By Proposition 2.2, for each we have
where . Taking the limit , we have
Letting , we get , which means is increasing in .
5.2 Below the minimal solution
We have proved that for each , uniformly on . Combining with Proposition 2.4 and Proposition 2.7, one has
Lemma 5.1.
Let . If , then uniformly on .
Lemma 5.2.
Let and there is a point such that , then tends to uniformly on as .
Proof.
We first prove that tends to as . We argue by contradiction. Assume there is a constant and a sequence such that . By Lemma 3.2, also has a upper bound independent of . Thus, the function is bounded continuous for each . By Proposition 2.6, we have . By Proposition 3.4, all of subsolutions are uniformly bounded. Denote by their lower bound. Let , then . By Lemma 3.2(2), has a lower bound independent of . Since , is smaller than every forward weak KAM solution of (E0). By Lemma 5.1, exists and it equals to . We conclude
which leads to a contradiction.
We then prove that tends to uniformly as . Let be the inverse function of . Take . We define , which tends to as . We take an arbitrary . If , then the proof is finished. So we assume . Let be the minimal point of . Take a geodesic with , and constant speed . By continuity, there is such that and for all . Then
where
is finite for a fixed by the assumption (). By the Gronwall inequality, we have
Since , we have . Take , we finally conclude that tends to as . ∎
So far, we complete the proof of Theorem 2.
5.3 Proof of Theorem 3
According to Proposition A.6, for , (E0) has a Lipschitz subsolution. Let be a subsolution of (E0) with . For , there holds
One can construct two different solutions and of (E0) from by Proposition A.7. Precisely, we have
| (5.1) |
It follows that .
Lemma 5.3.
Proof.
Lemma 5.4.
Proof.
We first prove that there is no solution different from such that . Assume that there is such a solution . Since , there is such that satisfies
Let be the point at which the above minimum is attained. Then
By Lemma 5.3, we have , which leads to a contradiction.
Let us recall is a subsolution of (E0) with . For , there holds
By Proposition 2.2(1) and Proposition 2.6, we have
for all . Letting , we have
| (5.2) |
for each . Let satisfy . Since by Lemma 5.4, there is such that on . Then we have
Letting and by (5.2), we have
Now we assume () holds. Then for each , there is and such that
Then we have . Since for , we have
The proof of Theorem 3 is now complete.
Acknowledgements: The authors would like to thank Professor J. Yan for many helpful discussions. Lin Wang is supported by NSFC Grant No. 12122109, 11790273.
Appendix A Auxiliary results
A.1 Proof of Proposition 2.5
Lemma A.1.
If is a Lipschitz subsolution of (B0), then .
Proof.
Without loss of generality, we assume is an open set of . In fact, for each absolutely continuous curve , we use a covering of it by local coordinate charts. Clearly, there exists such that with , , such that is contained in an open subset of .
By [9, Proposition 2.4], there is a function such that for almost all , we have
and the vector belongs to . Here we recall the definition of the Clarke’s generalized gradient
where stands for the closure of the convex combination. Since is a Lipschitz subsolution of (B0), if is differentiable at , we have
By the convexity of with respect to , and the definition of , we have
We conclude that
which implies . ∎
Lemma A.2.
If , then for each , we have . Moreover, if there exists such that for a.e. ,
then
Proof.
In the following, we only prove for each , since the proof of is similar. By contradiction, we assume there exists such that . Let be a minimizer of with , i.e.
| (A.1) |
Let . Since and , then one can find such that and for . A direct calculation shows
which implies for from the Gronwall inequality. It contradicts .
Next, we assume there exists such that for a.e. ,
Let us denote
and let be the Lax-Oleinik semigroup associated to . By a similar argument above, we have and . Note that . Using a similar argument as [18, Proposition 3.1], and for each . Therefore, and for each . This completes the proof. ∎
Lemma A.3.
If for each , , then is a Lipschitz subsolution of (E0).
Proof.
Fix , by assumption we have for each . By [14], there is a constant depending on and , such that . Let , we make a modification
Then is also the solution of (A0) with replaced by . One can prove that the Lagrangian corresponding to is continuous. By the uniqueness of the solution of (A0), we have , where is defined by (2.1) with replaced by .
Let be differentiable at . For each , there is a curve with and . By assumption for each , we have
Dividing by and let tend to zero, using the continuity of , and . We get
Since is arbitrary, we have
Therefore, is a Lipschitz subsolution of
By the definition of , is also a Lipschitz subsolution of (B0). ∎
A.2 Proof of Proposition 2.6
We only prove , the other side is similar. We argue by a contradiction. Assume that there is and such that
Let with be a minimizer of , and define
Then and . By continuity, there is such that and for all . By definition, for we have
which implies
By the Gronwall inequality, we have for , which contradicts .
A.3 Proof of Proposition 1.2
A.3.1 and subsolutions
Inspired by [5], we denote
Proposition A.4.
is finite.
Proof.
Choose , then by definition,
Let us recall
By the assumption (), there exists such that . Thus for each ,
This means is finite. ∎
Proposition A.5.
For , (E0) has no continuous subsolutions.
Proof.
By contradiction, we assume for , (E0) admits a continuous subsolution . By the definition of the subsolution, for any ,
Combining (CER), one can conclude that is Lipschitz continuous (see [8, Proposition 1.14] for more details). By [6, Lemma 2.2], for all , there exists such that and for all ,
We choose , then
this contradicts the definition of . ∎
A.3.2 Existence of subsolutions and solutions
Let us recall that denote the Lax-Oleinik semigroups associated to
Proposition A.6.
Proof.
By the definition of , there exists such that for all ,
| (A.2) |
Namely, is a subsolution of
By Proposition 3.4, is equi-bounded and equi-Lipschitz continuous. Then by the Ascoli-Arzelà theorem, it contains a subsequence uniformly converging on to some Lip. By the stability of subsolutions (see [3, Theorem 5.2.5]), is a subsolution of
Moreover, for and a.e. , we have
By Lemma A.2,
This completes the proof. ∎
Combining Propositions A.5, A.6 and 3.5, we conclude that (E0) has a solution if and only if . It remains to prove the following result.
Proposition A.7.
(E0) has at least two solutions for .
A.4 Proof of Proposition 1.6
Assume that is continuous and satisfies the condition (). Then the associated Lagrangian satisfies
-
(CL):
and are continuous;
-
(CON):
is convex in , for any ;
-
(SL):
there is a superlinear function such that .
With a slight modification, [2, Theorem 2.2] implies
Lemma A.8.
(Erdmann condition). For each , let be a minimizer of . Set with , and
then
satisfies a.e on .
Based on Lemma A.8, we have
Theorem A.9.
The function is locally Lipschitz on . More precisely, given two positive constants and with . For each and , the Lipschitz constant of depends only on , and .
Proof.
Step 1. Lipschitz estimate of minimizers. Given . In the following, we denote by a minimizer of . We focus on the Lipschitz regularity of the curve . Note that , is bounded by a constant depends only on and . We then have
By (SL), there is a constant such that , then we have
Thus, there is such that is bounded by a constant depends only on , and . Recall
By Lemma A.8, a.e. on . It follows that
By (CON) we have
We denote by the bound of for . Then we have
By (SL), is bounded by a constant depends only on , and .
Step 2. Lipschitz estimate of . We first show that is locally Lipschitz in . For any with , given and , , denote by the Riemannian distance between and , we have
where is a minimizer of and is a geodesic satisfying and with constant speed. By Step 1, the bound of depends only on , and . Since
and , the bound of also depends only on , and . Exchanging the role of and , one obtain that , where depends only on , and . By the compactness of , we conclude that for , the value function is Lipschitz on .
We are now going to show the locally Lipschitz continuity of in . Given and with . Let be a minimizer of , then
where the bound of depends only on , and . We have shown that for , the following holds
Thus, , where depends only on , and . The condition is similar. We conclude the Lipschitz continuity of on . ∎
References
- [1] P. Cannarsa, W. Cheng, K. Wang and J. Yan, Herglotz’ generalized variational principle and contact type Hamilton-Jacobi equations, Trends in Control Theory and Partial Differential Equations, 39–67, Springer INdAM Ser., 32, Springer, Cham, 2019.
- [2] P. Cannarsa, W. Cheng, L. Jin, K. Wang and J. Yan, Herglotz’ variational principle and Lax-Oleinik evolution, J. Math. Pures Appl., 141 (2020), 99–136.
- [3] P. Cannarsa and C. Sinestrari. Semiconcave functions, Hamilton-Jacobi equations, and optimal control. Vol. 58. Springer, 2004.
- [4] M. Crandall, H. Ishii and P.-L. Lions, User’s guide to viscosity solutions of second order partial differential equations, Bull. Amer. Math. Soc. (N.S.), 27 (1992), 1–67.
- [5] G. Contreras, R. Iturriaga, G. P. Paternain and M. Paternain, Lagrangian graphs, minimizing measures and Mañé’s critical values, Geom. Funct. Anal., 8 (1998), 788–809.
- [6] A. Davini, A. Fathi, R. Iturriaga and M. Zavidovique, Convergence of the solutions of the discounted Hamilton-Jacobi equation: convergence of the discounted solutions, Invent. Math., 206 (2016), 29–55.
- [7] A. Fathi, Weak KAM Theorem in Lagrangian Dynamics, preliminary version 10, Lyon, unpublished, 2008.
- [8] H. Ishii, A short introduction to viscosity solutions and the large time behavior of solutions of Hamilton-Jacobi equations. Hamilton-Jacobi equations: approximations, numerical analysis and applications, 111-249, Lecture Notes in Math., 2074, Fond. CIME/CIME Found. Subser., Springer, Heidelberg, 2013.
- [9] H. Ishii, Asymptoptic solutions for large time of Hamilton-Jacobi equations in Euclidean n space, Ann. Inst. H. Poincare Anal., 25 (2008), 231–266.
- [10] H. Ishii, K. Wang, L. Wang and J. Yan, Hamilton-Jacobi equations with their Hamiltonians depending Lipschitz continuously on the unknown, Comm. Partial Differential Equations, 47 (2022), 417–452.
- [11] L. Jin, J. Yan and K. Zhao, Nonlinear semigroup approach to Hamilton-Jacobi equations-A toy model, Minimax Theory Appl., 08 (2023), 061–084.
- [12] W. Jing, H. Mitake and H. V. Tran, Generalized ergodic problems: Existence and uniqueness structures of solutions, J. Differential equations, 268 (2020), 2886–2909.
- [13] P. Ni, Multiple asymptotic behaviors of solutions in the generalized vanishing discount problem. Proc. Amer. Math. Soc., published online.
- [14] P. Ni, L. Wang and J. Yan, A representation formula of the viscosity solution of the contact Hamilton-Jacobi equation and its applications, Chinese Ann. Math. Ser. B, to appear, arXiv:2101.00446.
- [15] P. Ni, K. Wang and J. Yan, Viscosity solutions of contact Hamilton-Jacobi equations with Hamiltonians depending periodically on unknown functions, Commun. Pur. Appl. Anal., 22 (2023), 668–685.
- [16] X. Su, L. Wang and J. Yan, Weak KAM theory for Hamilton-Jacobi equations depending on unkown functions, Discrete Contin. Dyn. Syst., 36 (2016), 6487–6522.
- [17] K. Wang, L. Wang and J. Yan, Implicit variational principle for contact Hamiltonian systems, Nonlinearity, 30 (2017), 492–515.
- [18] K. Wang, L. Wang and J. Yan, Variational principle for contact Hamiltonian systems and its applications, J. Math. Pures Appl., 123 (2019), 167–200.
- [19] K. Wang, L. Wang and J. Yan, Aubry-Mather theory for contact Hamiltonian systems, Commun. Math. Phys., 366 (2019), 981–1023.
- [20] K. Wang, L. Wang and J. Yan, Weak KAM solutions of Hamilton-Jacobi equations with decreasing dependence on unknown functions, J. Differential Equations, 286 (2021), 411–432.
- [21] M. Zavidovique, Convergence of solutions for some degenerate discounted Hamilton-Jacobi equations, Analysis PDE, 15 (2022), 1287–1311.