A New Two-component Sasa–Satsuma Equation: Large-time Asymptotics on the Line
Abstract.
We consider the initial value problem for a new two-component Sasa–Satsuma equation associated with Lax pair with decaying initial data on the line. By utilizing the spectral analysis, the solution of the new two-component Sasa–Satsuma system is transformed into the solution of a matrix Riemann–Hilbert problem. Then the long-time asymptotics of the solution is obtained by means of the nonlinear steepest descent method of Deift and Zhou for oscillatory Riemann–Hilbert problems. We show that there are three main regions in the half-plane , , where the asymptotics has qualitatively different forms: a left fast decaying sector, a central Painlevé sector where the asymptotics is described in terms of the solution of a new coupled Painlevé II equation which is related to a matrix Riemann–Hilbert problem, and a right slowly decaying oscillatory sector.
Key words and phrases:
Two-component Sasa–Satsuma equation; Cauchy problem; Long-time asymptotic behavior; Riemann–Hilbert problem; Nonlinear steepest descent method1. Introduction
The one-dimensional cubic NLS (nonlinear Schrödinger) equation
| (1.1) |
is a universal model for the evolution of quasi-monochromatic waves in weakly nonlinear dispersive media [6]. It has important applications in many different physical contexts, such as deep water waves, nonlinear fiber optics, acoustics, plasma physics, Bose–Einstein condensation (e.g., see [2, 14, 37, 40] and references therein). One of the most successful related applications is the description of optical solitons in fibres. However, in order to illustrate the propagation of the ultrashort (femtosecond) optical pulses, the NLS equation becomes less accurate [38], and thus some additional effects such as the third-order dispersion, self-steepening and stimulated Raman scattering should be added to meet this requirement. In this setting, Kodama and Hasegawa [23] proposed the higher-order NLS equation
| (1.2) |
where is a small parameter and represents the integrable perturbation of the NLS equation, , and are real parameters.
In general, Equation (1.2) is not completely integrable, unless certain restrictions are imposed on , and . In particular, when the ratio of their coefficients satisfies , the Equation (1.2) can be immediately reduced to the well-known integrable Sasa–Satsuma equation [39] in the form
| (1.3) |
For the convenience of analyzing the Sasa–Satsuma equation (1.3), according to [39], one can introduce variable transformations
| (1.4) |
then Equation (1.3) reduces to a complex modified KdV (Korteweg–de Vries)-type equation
| (1.5) |
On account of its integrability and physical implications, the Sasa–Satsuma equation has attracted much attention and various works have been presented since it was discovered. For instance, the double hump soliton solutions of the Sasa–Satsuma equation have been obtained in [34, 39] by means of inverse scattering approach. While, its multi-soliton solutions have been constructed in [19] by the Kadomtsev–Petviashvili hierarchy reduction method. Besides, the Darboux transformation [26] and the RH (Riemann–Hilbert) problem approach [48] were also imposed separately on this equation to obtain the high-order soliton solutions. Moreover, breather and rogue wave solutions for Sasa–Satsuma equation were also derived [4, 13, 35, 44]. In addition to the initial-boundary value problem for Sasa–Satsuma equation on the half-line and a finite interval were also investigated via the unified transform method in [45] and [47], respectively. Beyond that, the long-time asymptotic behaviour of the solution to Sasa–Satsuma equation (1.5) with decaying initial data were analyzed in [27, 29] and [21] respectively in the sectors and by using the nonlinear steepest descent method for oscillatory Riemann–Hilbert problems. Very recently, data-driven solutions and parameter discovery of the Sasa–Satsuma equation was studied via the physics-informed neural networks method in [32].
Since various complex systems such as multimode or wavelength-division multiplexing fibers usually involve more than one component, the studies should be extended to multi-component Sasa–Satsuma equation cases [16, 28, 36, 41, 50]. Based on this fact, in present paper, we will consider a new integrable two-component Sasa–Satsuma equation [16, 20, 41],
| (1.6) | ||||
where is a complex-valued function, is a real-valued function. It is readily to see that when , the new two-component Sasa–Satsuma equation (1.6) can be reduced to the Sasa–Satsuma equation (1.5) with . On the basis of spectral analysis of the matrix Lax pair for the two-component Sasa–Satsuma equation, the -soliton formulas expressed by the ratios of determinants were discussed in [41] via the RH approach, moreover, the traveling soliton, breather soliton and rogue wave solutions have been constructed by Darboux transformation method in [16]. Recently, the initial-boundary value problem of Equation (1.6) on the half-line has been solved with the aid of the unified transformation method [20].
The inverse scattering transform based on the RH problem is a very powerful tool in the study of the nonlinear integrable equations. It can obtain explicit soliton solutions for the integrable systems under reflectionless potentials condition. However, as is well-known, one can not solve the RH problems in a closed form unless in the case of reflectionless potentials. As a consequence, the study on large-time asymptotic behavior of solutions becomes an attractive topic in integrable systems. There were a number of progresses in this formidable subject [3, 22, 49], nevertheless, the nonlinear steepest descent method for oscillatory Riemann–Hilbert problems proposed by Deift and Zhou [15] turned out to be a great achievement in the further development of analyzing the long-time asymptotics for the initial value problems of integrable nonlinear evolution equations. Up to now, with this method, numerous new significant long-time asymptotic results for various nonlinear completely integrable models associated with matrix spectral problems were obtained in a rigorous and transparent form (see [5, 7, 8, 10, 11, 25, 30, 42, 46]). Recently, the long-time asymptotics for some integrable nonlinear evolution equations associated with higher-order matrix Lax pairs were studied in accordance with the procedures of the Deift–Zhou nonlinear steepest descent method, such as Degasperis–Procesi equation [9], coupled NLS equation [17], Sasa–Satsuma equation [21, 27, 29], Spin-1 Gross–Pitaevskii equation [18], matrix modified KdV equation [31], three-component coupled NLS system [33] and so on.
The main goal of the present paper is to extend the nonlinear steepest descent method to study the long-time asymptotic behavior for the Cauchy problem of the new two-component Sasa–Satsuma equation (1.6) associated with a Lax pair on the line with the initial data
| (1.7) |
where and belong to the Schwartz space . Our first step is to formulate the main matrix RH problem corresponding to Cauchy problem (1.6)-(1.7). The most outstanding structure of this system is that it admits a matrix spectral problem, however, all the matrices in this paper can be rewritten as block ones. Thus we can directly formulate the matrix RH problem by the combinations of the entries in matrix-valued eigenfunctions instead of using the Fredholm integral equation to construct another set of eigenfunctions [9, 12]. As a consequence, a RH representation of the solution of the Cauchy problem (1.6)-(1.7) is given (Theorem 2.1). Then, this representation obtained allows us to apply the nonlinear steepest descent method for the associated matrix RH problem and to obtain a detailed description for the leading-order term of the asymptotics of the solution.
We will first consider the asymptotic behavior of the solution in oscillatory sector characterized by (3.1) (Theorem 3.2). It is noted that the phase function of involved in the jump matrix has two stationary points in this region. This immediately leads us to introduce a matrix-valued function function to remove the middle matrix term when we split the jump matrix into an appropriate upper/lower triangular form. However, the function cannot be solved explicitly since it satisfies a matrix RH problem. Recalling that the topic of our paper is studying the asymptotic behavior of solution, we can replace function with by adding an error term by following the idea first introduced in [17]. Then the exact solution of a class of model RH problem that is relevant near the critical points is derived (Theorem 3.1), which generalizes the model problem considered in [17, 27, 29, 33] and also can be used to analyze the long-time asymptotics of other integrable models. Next, we study the asymptotics of solution in Painlevé sector given in (4.1) (Theorem 4.2). Our main result shows that the leading-order asymptotics for Equation (1.6) is depicted in terms of the solution of a new coupled Painlevé II equation (B.5). Interestingly, we noticed that the functions and of solution of (B.5) are complex-valued and real-valued functions, respectively, moreover, has constant phase, which is very different from the result obtained for the matrix modified KdV equation in same region [31]. This innovative work enriches the Painlevé asymptotic theory in the field of long-time dynamic analysis for integrable systems. Finally, the asymptotic behavior of the solution in the fast decay sector (5.1) is derived by performing a trivial contour deformation (Theorem 5.1).
The organization of this paper is as follows. In Section 2, a basic matrix RH problem with the aid of the inverse scattering method is constructed, whose solution gives the solution of the initial value problem (1.6)-(1.7), where the Lax pair of the new two-component Sasa–Satsuma equation and the relevant matrices are written as block forms. Sections 3-5 perform the asymptotic analysis of this RH problem leading to asymptotic formulas for the solution. We mainly analyze three regions in the -half-plane where the asymptotic behavior of the solution is qualitatively different: (i) A slowly decaying oscillatory sector (Theorem 3.2), (ii) A Painlevé sector (Theorem 4.2), (iii) A fast decay sector (Theorem 5.1). Appendix A is devoted to give the proof of Theorem 3.1. The RH problem associated with the new coupled Painlevé II equation is discussed in Appendix B.
2. Basic Riemann–Hilbert problem
An essential ingredient in the following analysis is the matrix Lax pair [41] of the new two-component Sasa–Satsuma equation (1.6), which reads
| (2.1) | |||
| (2.2) |
where is a matrix-valued function, is the spectral parameter, . The matrix-valued functions
| (2.3) | ||||
| (2.4) |
where and denote complex conjugation of a complex number and Hermitian conjugation of a complex matrix or vector, respectively. A direct calculation shows that the zero-curvature equation is equivalent to the new two-component Sasa–Satsuma equation (1.6). On the other hand, it is noted the matrices and obey the symmetry conditions:
| (2.5) | ||||
| (2.6) |
where
| (2.7) |
Introducing a new eigenfunction by
| (2.8) |
we obtain
| (2.9) | |||
| (2.10) |
We now define two Jost solutions of (2.9) for with as by the following Volterra integral equations
| (2.11) |
Denote and be the first column and last three columns of the matrices . Then, the following are consequences of standard analysis of the iterates that:
, are analytic in and can be continuously extended to , as ;
, are analytic in and can be continuously extended to , as .
Since are both fundamental matrices of solutions of (2.9), thus, they satisfy the scattering relation
| (2.12) |
Evaluation at gives
| (2.13) |
that is,
| (2.14) |
This implies that the scattering matrix can be determined in terms of the initial values and .
The symmetries in (2.5) and (2.6) implies that
| (2.15) |
Moreover, the tracelessness of shows that Then (2.12) yields By (2.15), the matrix-valued spectral function obeys the symmetries
| (2.16) |
It follows from the first symmetry in (2.16) that we can write as
| (2.17) |
where adj denotes the adjoint matrix of in the context of linear algebra, is a matrix-valued function and is a row vector-valued function. On the other hand, it is easy to see from (2.14) that is analytic for , however, is only defined in . Furthermore, we also from the second symmetry in (2.16) have
| (2.18) |
To exclude soliton-type phenomena, for convenience, we assume that has no zeros in . Then, we have the following main result in this section, which shows how solutions of (1.6) can be constructed by a basic matrix Riemann–Hilbert problem.
Theorem 2.1.
Define a piecewise meromorphic matrix-valued function
| (2.19) |
and the matrix-valued jump matrix by
| (2.20) |
where
| (2.21) |
Then the following matrix RH problem:
is a sectionally meromorphic function with respect to ;
The limiting values satisfy the jump condition for ;
As , has the asymptotics: ;
has a unique solution for each .
Moreover, define in terms of by
| (2.22) |
which solves the Cauchy problem of new two-component Sasa–Satsuma equation (1.6).
Proof.
It is a simple consequence of Liouville’s theorem that if a solution exists, it is unique. The existence of solution of RH problem follows by means of Zhou’s vanishing lemma argument [51] since
| (2.23) |
Expanding this solution as ,
| (2.24) |
and inserting this into equation (2.9) one finds that the solution of (1.6) is given by (2.22).
∎
3. Asymptotic analysis in oscillating sector
The representation of the solution of the Cauchy problem for a nonlinear integrable equation in terms of the solution of an associated RH problem makes it possible to analyze the long-time asymptotics via the Deift–Zhou steepest descent method [15]. The goal of this section is devoted to deriving the long-time asymptotic behavior of solution for the new two-component Sasa–Satsuma equation (1.6) in oscillating sector defined by
| (3.1) |
We first prove an important result (Theorem 3.1), which expresses the large behavior of solution of a model RH problem in terms of the solution of parabolic cylinder functions and will be very useful in the study of long-time asymptotics in the oscillating sector.
3.1. A model RH problem

Define the oriented contour by
| (3.2) | ||||
see Figure 1. For a complex-valued row vector , define the function by and the jump matrix by
| (3.3) |
We consider the following RH problem:
is analytic for and extends continuously to ;
Across , the boundary values satisfy the jump relation ;
, as .
Theorem 3.1.
The RH problem has a unique solution for each row vector , and this solution satisfies
| (3.4) |
where
| (3.5) |
where denotes the standard Gamma function. Moreover, for each compact subset of ,
| (3.6) |
Proof.
See Appendix A. ∎
3.2. Transformations
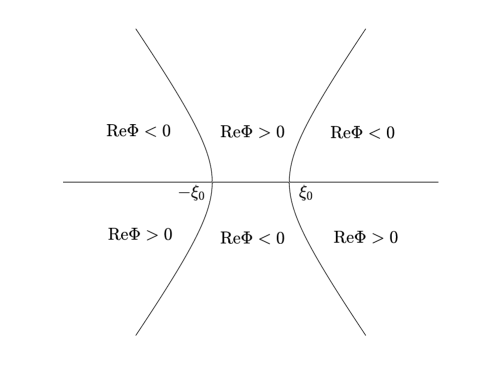
The Deift–Zhou nonlinear steepest descent method for RH problems consists of making a series of invertible transformations in order to arrive at a problem that can be approximated in the large- limit. For this purpose, we first note that the jump matrix defined in (2.20) involves the exponentials , where is given by
| (3.7) |
Suppose . By solving the equation we see that there are two real critical points located at
| (3.8) |
moreover, the signature table for Re is shown in Figure 2.
The jump matrix enjoys two distinct factorizations:
| (3.9) |
Thus, by signature table in Figure 2, we can see that the jump matrix has the wrong factorization for . Hence the first transformation is to introduce by
| (3.10) |
where the matrix-valued function satisfies the following RH problem:
is analytic for , and it takes continuous boundary values on from the upper and lower half-planes;
The boundary values on the jump contour (oriented to right) are related as
| (3.11) |
as .
Since the jump matrix is positive definite, the vanishing lemma of Zhou [51] yields the existence and uniqueness of the function . Furthermore, it is easy to see that obeys a scalar RH problem:
is analytic for ;
takes continuous boundary values on , and they are related by the jump condition
| (3.12) |
.
Proposition 3.1.
The functions and have the following properties:
| (3.13) |
and
| (3.14) |
where for any matrix .
Then satisfies the following matrix RH problem:
is analytic for , and it takes continuous boundary values on from the upper and lower half-planes;
The boundary values on the jump contour are related as
| (3.15) |
where the jump matrix is given by
| (3.16) |
as .

The next step is to deform the contour such that the jump matrix involves the exponential factor on the parts of the contour where Re is negative, the factor on the parts where Re is positive and the jumps on the original contour are small remainders with respect to . To achieve this goal, we should introduce the analytic approximations of and . The symmetry of in (2.21) implies that we can rewrite
| (3.17) | ||||
| (3.18) |
Let , denote the open subsets of displayed in Figure 3, then we have the following lemma.
Lemma 3.1.
There exist decompositions
| (3.19) | ||||
| (3.20) |
where the functions and , have the following properties:
(1) For each and , is defined and continuous for and analytic in .
(2) The function satisfies the following estimates
| (3.21) |
and
| (3.22) |
(3) The and norms of the function on are as uniformly with respect to .
(4) The and norms of the function on are as uniformly with respect to .
Proof.
See Lemma 4.8 in [24]. ∎
For , the decomposition of can be similarly found. Thus, we establish the decompositions of , and of by setting
Now, we can introduce by
| (3.23) |
where the sectionally analytic function is defined by
| (3.24) |
Let denote the contour displayed in Figure 3. It follows that satisfies the following RH problem:
is analytic off , and it takes continuous boundary values on ;
Across the oriented contour , the boundary values are connected by the following formula:
| (3.25) |
, as ;
where the jump matrix is given by
| (3.26) | ||||
with denoting the restriction of to the contour labeled by in Figure 3.
3.3. Local models
Obviously, as , the matrix decays to zero everywhere except near the critical points . This implies that the main contribution to the long-time asymptotics of should come from the neighborhoods of .
In order to relate to the solution of the model RH problem in Theorem 3.1, we introduce the following scaling transforms for near
| (3.27) | |||
| (3.28) |
Observe that the matrix-valued function can not be expressed explicitly, in order to proceed to the next step, we write, for example,
| (3.29) |
For the second term in the right-hand side of (3.29), by Plemelj formula, we know that
| (3.30) |
where
| (3.31) | ||||
| (3.32) |
thus, a direct computation yields that
| (3.33) |
where
| (3.34) | ||||
| (3.35) |
However, for the first term in the right-hand side of (3.29), if we denote
| (3.36) |
one can find that satisfies the following RH problem:
is analytic in with continuous boundary values on ;
On the jump contour , satisfies the jump condition
| (3.37) |
where
| (3.38) |
as .
By [1], the function can be expressed by
| (3.39) | ||||
Define , then we have the following lemma.
Lemma 3.2.
As , for , the estimate for holds:
| (3.40) |
Proof.
See Lemma 3.2 in [31]. ∎
Remark 3.1.
In a similar way, we have for ,
| (3.41) |
where . Analogous estimates also follow for .
Let be the cross defined by (3.2) centered at and denote the open disk of radius centered at for a small , . Then, combining above analysis, we find that as , the jump matrix in tends to for , where
| (3.42) |
This suggests that in the neighborhood of , we can approximate by a matrix-valued function of the form
| (3.43) |
where is the solution of the model RH problem considered in Subsection 3.1 by setting .
Lemma 3.3.
The function defined in (3.43) is analytic and bounded for . On the contour , satisfies the jump relation , and obeys the estimate for :
| (3.44) |
As , we have
| (3.45) |
and
| (3.46) |
Proof.
The analyticity and bound of are a consequence of Theorem 3.1. Moreover, for , that is, , , it follows from the Lemma 3.35 in [15] that
| (3.47) |
Thus, together with (3.40) and (3.41), we have
| (3.48) |
Hence, we arrive at
| (3.49) |
By the general inequality , we find
| (3.50) |
The norms on , can be estimated in a similar way. Therefore, (3.44) follows.
On the other hand, it is easy to check that as , the jump matrix in tends to for . Thus, we can approximate in the neighborhood of by .
3.4. Find asymptotic formula
Define the approximate solution by
| (3.53) |
Let be
| (3.54) |
Denote and suppose that the boundaries of are oriented counterclockwise, see Figure 4. Then satisfies the following matrix RH problem:
is analytic for with continuous boundary values on ;
Across the contour , the limiting values obey the jump relation
| (3.55) |
As , ;
where the jump matrix is given by
| (3.56) |

Now we rewrite as:
where
and denote , then we have the following lemma.
Lemma 3.4.
For , the following estimates hold:
| (3.57) | ||||
| (3.58) | ||||
| (3.59) | ||||
| (3.60) |
Proof.
It follows the same line as Lemma 3.4 in [31]. ∎
The uniformly vanishing bound on in Lemma 3.4 establishes RH problem for as a small-norm Riemann–Hilbert problem, for which there is a well known existence and uniqueness theorem [15]. In fact, we may write
| (3.61) |
where the matrix-valued function is the unique solution of
| (3.62) |
The singular integral operator : is defined for by
| (3.63) | ||||
| (3.64) |
where is the well known Cauchy operator. Then, by Lemma 3.4 and (3.63), we find
| (3.65) |
where denotes the Banach space of bounded linear operators . Therefore, there exists a such that is invertible for all . And hence the existence of both and immediately follow.
Moreover, standard estimates using the Neumann series shows that satisfies
| (3.66) |
In fact, Equation (3.62) is equivalent to . Using the Neumann series, one can obtain
whenever . Then, we find
| (3.67) |
for all large enough. In view of Lemma 3.4, this gives (3.66).
It then follows from (3.10), (3.23), (3.54), (3.53) and (3.61) that
| (3.68) |
By (3.46), (3.53), (3.57) and (3.66), we can get
| (3.69) | ||||
Similarly, the contributions from , and to the right-hand side of (3.68) are , and , respectively.
Thus, taking into account that the reconstructional formula (2.22) and (3.5), we get
| (3.70) | ||||
Collecting above computations, we obtain the long-time asymptotic result of the solution in oscillating sector .
Theorem 3.2.
Let and lie in the Schwartz space , and generate the scattering data in sense that: the determinant of the matrix-valued spectral function defined in (2.17) has no zeros in . Then, in oscillating sector , as , the solution of the initial problem for the new two-component Sasa-Satsuma equation (1.6) on the line satisfies the following asymptotic formula
| (3.71) |
where the leading-order coefficient and are given by
| (3.72) | ||||
| (3.73) | ||||
where , , and , are given by (3.8), (3.31), (3.32) and (3.17), respectively.
4. Asymptotic analysis in Painlevé sector
In this section, we study the long-time asymptotics of solution to the new two-component Sasa–Satsuma equation (1.6) in Painlevé region defined by
| (4.1) |
Let
denote the right and left halves of . The long-time asymptotic formula of the solution for the case will be established, the case when can be handled in a similar but easy way.
At first, we will prove Theorem 4.1, which expresses the large behavior of the solution of a model RH problem in terms of the solution of a new coupled Painlevé II equation. This result will be important for analyzing the long-time asymptotics of the solution of system (1.6) in region .
4.1. Another model RH problem

Given , let denote the contour , where the line segments
| (4.2) | ||||
are oriented as in Figure 5. We consider the following family of RH problems parameterized by and a complex-valued row vector with for :
is analytic in with continuous boundary values on ;
For , the boundary values satisfy the jump relation
, as ;
where the jump matrix is defined by
| (4.3) |
Theorem 4.1.
Define the parameter subset
| (4.4) |
where , are constants. Then the RH problem for with jump matrix has a unique solution whenever . There are smooth functions such that
| (4.5) |
however, the entry and entry of leading coefficient are given by
| (4.6) |
where and are complex-valued and real-valued functions, respectively, and are the smooth solution of a new coupled Painlevé II equation (B.5). Moreover, is uniformly bounded for , and satisfies the symmetries
| (4.7) |
Proof.
It is easy to see that
for all and with and . Thus, we have
Analogous estimates hold for . This shows that exponentially fast as .
Note that, the jump matrix satisfies the same symmetries (B.6) and (B.14) as . In other words, is Hermitian and positive definite on and satisfies on . This implies that the jump conditions and the jump matrices in the RH problem for satisfy the hypotheses of Zhou’s vanishing lemma [51], that is, the jump contour has the necessary invariance under Schwarz reflection with orientation and if lies in the part of jump contour on the real axis, is positive definite. Thus we deduce the unique existence of the solution . The symmetries of implies that (4.7) follows. Moreover, the RH problem for can be transformed into the RH problem for stated in Appendix B up to a trivial contour deformation. Therefore, we complete the proof of Theorem 4.1. ∎
4.2. Transformations
Suppose . Then, as , the critical points given by (3.8) approach 0. In this case, we only need the triangular factorization of the jump matrix in the form as follows:
| (4.8) |

Define the contour by , where
| (4.9) | ||||
The orientation of and the triangular domains , are shown in Figure 6. Recalling (3.17), by Lemma 3.1, we also have the following analytic decomposition lemma for and .
Lemma 4.1.
For , we have
| (4.10) |
where the functions and satisfy:
(i) For , is defined and continuous for and analytic for .
(ii) The function satisfies
| (4.11) |
and
| (4.12) |
(iii) The and norms of the function on are as uniformly with respect to .
Thus, we have obtained a decomposition by setting
Now we can deform the contour by introducing the new matrix-valued function as follows:
| (4.13) |
Then satisfies the following RH problem:
is analytic in with continuous boundary values on ;
For , the limiting values obey the jump condition
where
| (4.14) |
As , .
4.3. Local model

Select suitable and denote . Define contour , see Figure 7. Let
| (4.15) |
such that
| (4.16) |
Then for fixed and as , the jump matrix tends to
| (4.17) |
which is nothing but the jump matrix defined in (4.3) with . Thus, as , in , the solution can be approximated by a matrix-valued function defined by
| (4.18) |
where is the solution of the model RH problem established in Subsection 4.1 with . Moreover, if , then , where is the parameter subset defined in (4.4). Thus, Theorem 4.1 implies that is well-defined by (4.18).
Lemma 4.2.
For , the function is analytic for such that . Across the contour , the continuous boundary values obey the jump relation , where jump matrix satisfies, for ,
| (4.19) |
Moreover, as , we have
| (4.20) |
and
| (4.21) |
where
| (4.22) |
furthermore, the complex-valued function and real-valued function are the smooth solution of the new coupled Painlevé II equation (B.5).
Proof.
The proof follows the similar lines as Lemma 4.1 in [31]. ∎
4.4. Find asymptotic formula
Define the contour and let the boundary of is oriented counterclockwise as depicted in Figure 7. We now introduce by
| (4.23) |
It then can be shown that satisfies the following RH problem:
is analytic outside the contour with continuous boundary values on ;
For , we have the jump relation
, as ;
where the jump matrix is described by
| (4.24) |
Lemma 4.3.
Let , . For each , we have
| (4.25) | |||
| (4.26) | |||
| (4.27) | |||
| (4.28) |
Proof.
See the proof of Lemma 4.3 in [11]. ∎
As the discussion in Subsection 3.4, the estimates in Lemma 4.3 show that the RH problem for has a unique solution given by
| (4.29) |
where satisfies the estimate
| (4.30) |
As , it then follows from (4.13), (4.23) and (4.29) that
| (4.31) | ||||
Using the reconstruction formula (2.22), we hence obtain long-time asymptotics of the solution in Painlevé sector .
Theorem 4.2.
Under the assumptions of Theorem 3.2, the solution of the new two-component Sasa–Satsuma equation (1.6) satisfies the following asymptotic formula in Painlevé region as
| (4.32) | ||||
| (4.33) |
where complex-valued function and real-valued function denote the smooth solution of the new coupled Painlevé II equation (B.5) corresponding to according to Lemma B.1. Particularly, the function has constant phase, namely, is independent of .
5. Asymptotic analysis in fast decay sector
Finally, we will study the long-time asymptotic behavior of solution to Equation (1.6) in the fast decay region defined by
| (5.1) |
In this region, the signature table for real part of phase function is shown in Figure 8.

5.1. Transformations
Define open sets
| (5.2) |
as shown in Figure 8. Then, according to the analysis of previous sections, we can similarly obtain the analytic decomposition of : . Moreover, the function is defined and continuous for and analytic in , the and norms of the function on are as . In order to perform the contour deformation, we would like to define the lines , , and the orientation is depicted in Figure 8. Then, let us perform the transform
| (5.3) |
Hence, the matrix RH problem for is as follows:
is analytic for ;
The continuous boundary values at satisfy the jump condition
;
, as ;
where the jump matrix
| (5.4) |
5.2. Find asymptotic formula
Now decays exponentially fast to the identity matrix as on the contours . Set . Therefore, one can find that for
| (5.5) | |||
| (5.6) |
which immediately yields that
| (5.7) | ||||
where is defined by and obeys
| (5.8) |
Hence, by (2.22), we get the following theorem.
Appendix A Proof of Theorem 3.1
The proof of Theorem 3.1 relies on deriving an explicit formula for the solution in terms of parabolic cylinder functions. First, note that the jump matrix obeys the symmetry
| (A.1) |
It then follows that the RH problem for admits a Zhou’s vanishing lemma [51], as a result, there exists a unique solution which admits an expansion of the form (3.4) with respect to .
To find the leading-order coefficient of large asymptotic behavior for the solution , we let
| (A.2) |
where we suppress the dependence for clarity. It follows that has no jump discontinuity along any of the rays. On the other hand, one find as ,
| (A.3) |
Therefore, Liouville’s argument implies that
| (A.4) |
where
| (A.5) |
Here we write a matrix as a block form
| (A.6) |
with is scalar. Particularly, we have
| (A.7) |
The symmetries (A.1) of together with the uniqueness of the solution of the RH problem imply the following symmetry for :
| (A.8) |
which further yields that
| (A.9) |
Next, considering (A.4) and (A.5), we can obtain
| (A.10) | |||
| (A.11) | |||
| (A.12) | |||
| (A.13) |
Then, by simple change of variables, it can be shown that Equations (A.10) and (A.12) can be transformed into the parabolic cylinder equation
| (A.14) |
However, it is known that the solution of Equation (A.14) can be expressed as
| (A.15) |
where , are constants and is the standard parabolic cylinder function [43]. Then, denoting , we have
| (A.16) | ||||
| (A.17) |
On the other hand, it follows from [43] that as ,
| (A.18) |
Hence, as , we find that
| (A.19) | ||||
| (A.20) |
because as ,
| (A.21) |
It then follows from the property of
| (A.22) |
| (A.23) | ||||
Accordingly, for , we can get
| (A.24) | ||||
| (A.25) | ||||
| (A.26) | ||||
| (A.27) |
Appendix B A new coupled Painlevé II RH problem

Let denote the contour oriented to the right as in Figure 9, where
| (B.1) | ||||
Let be a complex-valued row vector with and define the jump matrix by
| (B.2) |
Then we consider the following model RH problem:
is analytic in with continuous boundary values on ;
, for ;
, as .
Lemma B.1.
The RH problem for has a unique solution for each . Moreover, there are smooth functions of with decay as such that
| (B.3) |
and the , entries of leading coefficient can be expressed by
| (B.4) |
where and are complex-valued and real-valued functions, respectively, and satisfy a new coupled Painlevé II equation
| (B.5) | |||
Moreover, the function has constant phase, that is, is independent of .
Proof.
The symmetry
| (B.6) |
implies that the jump condition and jump matrix in RH problem for satisfy the hypotheses of Zhou’s vanishing lemma [51]. Therefore, the existence and uniqueness of immediately follow, and hence the expansion (B.3). On the other hand, by the standard nonlinear steepest descent analysis, the coefficients have exponential decay as .
Let . Then, the function is an entire function of by Liouville’s theorem. Thus, one can find
| (B.7) |
Similarly, the function is entire, and hence,
| (B.8) | ||||
On the other hand, by (B.7), we also have
| (B.9) |
and then inserting the expansion (B.3) into (B.9), one can obtain
| (B.10) |
that is,
| (B.11) |
The definitions of and yields that the function admits the Lax equations
| (B.12) |
Then the compatibility condition of (B.12) implies that
| (B.13) |
However, the symmetric relation (B.6) and
| (B.14) |
implies that the solution of RH problem for satisfies
| (B.15) |
Hence, the leading order coefficient obeys
| (B.16) |
For convenience, we write
| (B.17) |
where is scalar. Now, substituting (B.17) into (B.13), using the first relation in (B.16), we have
| (B.18) | |||
| (B.19) | |||
| (B.20) |
Since and its derivatives decay as , it follows from (B.18) and (B.20) that
| (B.21) | ||||
Inserting (B.21) into (B.19), we get
| (B.22) |
Finally, according to the second symmetry in (B.16), we find , thus, we can write
| (B.23) |
where and are complex-valued and real-valued functions, respectively. Substituting (B.23) into (B.22), one immediately obtain
| (B.24) | |||
Writing with , being real functions, then the first equation in (B.24) reduces to the following system
| (B.25) | ||||
| (B.26) |
It then follows from (B.26) that
| (B.27) |
where is a real constant. Using this relation to eliminate from (B.25), we find
| (B.28) |
The decay of , and their derivatives as imply that . Therefore, is independent of .
The proof of lemma is now completed. ∎
References
- [1] M.J. Ablowitz, A.S. Fokas, Complex Variables: Introduction and Applications, Cambridge University Press, Cambridge (2003).
- [2] M.J. Ablowitz, B. Prinari, A.D. Trubatch, Discrete and Continuous Nonlinear Schrödinger Systems, Cambridge University Press, Cambridge (2003).
- [3] M.J. Ablowitz, H. Segur, Asymptotic solutions of the Korteweg–de Vries equation, Stud. Appl. Math. 57 (1977) 13–44.
- [4] N. Akhmediev, J.M. Soto-Crespo, N. Devine, N.P. Hoffmann, Rogue wave spectra of the Sasa–Satsuma equation, Phys. D 294 (2015) 37–42.
- [5] L.K. Arruda, J. Lenells, Long-time asymptotics for the derivative nonlinear Schrödinger equation on the half-line, Nonlinearity 30 (2017) 4141–4172.
- [6] D.J. Benney, A.C. Newell, Propagation of nonlinear wave envelopes, J. Math. Phys. 46 (1967) 133–139.
- [7] M. Borghese, R. Jenkins, K.T.-R. McLaughlin, Long time asymptotic behavior of the focusing nonlinear Schrödinger equation, Ann. Inst. Henri Poincaré, Anal. Non Linéaire 35(4) (2018) 887–920.
- [8] A. Boutet de Monvel, A. Its, V. Kotlyarov, Long-time asymptotics for the focusing NLS equation with time-periodic boundary condition on the half-line, Comm. Math. Phys. 290 (2009) 479–522.
- [9] A. Boutet de Monvel, D. Shepelsky, A Riemann–Hilbert approach for the Degasperis–Procesi equation, Nonlinearity 26 (2013) 2081–2107.
- [10] R. Buckingham, S. Venakides, Long-time asymptotics of the nonlinear Schrödinger equation shock problem, Comm. Pure Appl. Math. 60 (2007) 1349–1414.
- [11] C. Charlier, J. Lenells, Airy and Painlevé asymptotics for the mKdV equation, J. London Math. Soc. 101(1) (2020) 194–225.
- [12] C. Charlier, J. Lenells, Long-time asymptotics for an integrable evolution equation with a Lax pair, Phys. D 426 (2021) 132987.
- [13] S. Chen, Twisted rogue-wave pairs in the Sasa–Satsuma equation, Phys. Rev. E 88 (2013) 023202.
- [14] R. Chiao, E. Garmire, C. Townes, Self-trapping of optical beams, Phys. Rev. Lett. 13 (1964) 479–482.
- [15] P. Deift, X. Zhou, A steepest descent method for oscillatory Riemann–Hilbert problems. Asymptotics for the MKdV equation, Ann. Math. 137 (1993) 295–368.
- [16] X. Geng, Y. Li, J. Wei, Y. Zhai, Darboux transformation of a two-component generalized Sasa–Satsuma equation and explicit solutions, Math. Meth. Appl. Sci. 44 (2021) 12727–12745.
- [17] X. Geng, H. Liu, The nonlinear steepest descent method to long-time asymptotics of the coupled nonlinear Schrödinger equation, J. Nonlinear Sci. 28(2) (2018) 739–763.
- [18] X. Geng, K. Wang, M. Chen, Long-time asymptotics for the Spin-1 Gross–Pitaevskii equation, Commun. Math. Phys. 382(1) (2021) 585–611.
- [19] C. Gilson, J. Hietarinta, J. Nimmo, Y. Ohta, Sasa–Satsuma higher-order nonlinear Schrödinger equation and its bilinearization and multisoliton solutions, Phys. Rev. E 68 (2003) 016614.
- [20] B. Hu, L. Zhang, J. Lin, The initial-boundary value problems of the new two-component generalized Sasa–Satsuma equation with a matrix Lax pair, Anal. Math. Phys. 12 (2022) 109.
- [21] L. Huang, J. Lenells, Asymptotics for the Sasa–Satsuma equation in terms of a modified Painlevé II transcendent, J. Differential Equations 268 (2020) 7480–7504.
- [22] A. Its, Asymptotic behavior of the solutions to the nonlinear Schrödinger equation, and isomonodromic deformations of systems of linear differential equations, Dokl. Akad. Nauk SSSR 261(1) (1981) 14–18.
- [23] Y. Kodama, A. Hasegawa, Nonlinear pulse propagation in a monomode dielectric guide, IEEE J. Quantum Elect. 23 (1987) 510–524.
- [24] J. Lenells, The nonlinear steepest descent method for Riemann–Hilbert problems of low regularity, Indiana Univ. Math. J. 66 (2017) 1287–1332.
- [25] Z. Li, S. Tian, J. Yang, E. Fan, Soliton resolution for the complex short pulse equation with weighted Sobolev initial data in space-time solitonic regions, J. Differential Equations 329 (2022) 31–88.
- [26] L. Ling, The algebraic representation for high order solution of Sasa–Satsuma equation, Discrete Contin. Dyn. Syst. Ser. S 9 (2016) 1975–2010.
- [27] H. Liu, X. Geng, B. Xue, The Deift–Zhou steepest descent method to long-time asymptotics for the Sasa–Satsuma equation, J. Differential Equations 265 (2018) 5984–6008.
- [28] L. Liu, B. Tian, Y. Yuan, Z. Du, Dark-bright solitons and semirational rogue waves for the coupled Sasa–Satsuma equations, Phys. Rev. E 97 (2018) 052217.
- [29] N. Liu, B. Guo, Long-time asymptotics for the Sasa–Satsuma equation via nonlinear steepest descent method, J. Math. Phys. 60(1) (2019) 011504.
- [30] N. Liu, B. Guo, Painlevé-type asymptotics of an extended modified KdV equation in transition regions, J. Differential Equations 280 (2021) 203–235.
- [31] N. Liu, X. Zhao, B. Guo, Long-time asymptotic behavior for the matrix modified Korteweg–de Vries equation, Phys. D 443 (2023) 133560.
- [32] H. Luo, L. Wang, Y. Zhang, G. Lu, J. Su, Y. Zhao, Data-driven solutions and parameter discovery of the Sasa–Satsuma equation via the physics-informed neural networks method, Phys. D 440 (2022) 133489.
- [33] W. Ma, Long-time asymptotics of a three-component coupled nonlinear Schrödinger system, J. Geom. Phys. 153 (2020) 103669.
- [34] D. Mihalache, L. Torner, F. Moldoveanu, N. Panoiu, N. Truta, Inverse-scattering approach to femtosecond solitons in monomode optical fibers, Phys. Rev. E 48 (1993) 4699–4709.
- [35] G. Mu, Z. Qin, Dynamic patterns of high-order rogue waves for Sasa–Satsuma equation, Nonlinear Anal. Real World Appl. 31 (2016) 179–209.
- [36] K. Nakkeeran, K. Porsezian, P. Shanmugha Sundaram, A. Mahalingam, Optical solitons in -coupled higher order nonlinear Schrödinger equations, Phys. Rev. Lett. 80 (1998) 1425–1428.
- [37] D.H. Peregrine, Water waves, nonlinear Schrödinger equations and their solutions, J. Aust. Math. Soc. B 25 (1983) 16–43.
- [38] J.E. Rothenberg, Space-time focusing: breakdown of the slowly varying envelope approximation in the self-focusing of femtosecond pulses, Optim. Lett. 17 (1992) 1340–1342.
- [39] N. Sasa, J. Satsuma, New-type of soliton solutions for a higher-order nonlinear Schrödinger equation, J. Phys. Soc. Jpn. 60 (1991) 409–417.
- [40] C. Sulem, P.-L. Sulem, The Nonlinear Schrödinger Equation: Self-focusing and Wave Collapse, Springer, New York, 1999.
- [41] J. Wang, T. Su, X. Geng, R. Li, Riemann–Hilbert approach and -soliton solutions for a new two-component Sasa–Satsuma equation, Nonlinear Dyn. 101 (2020) 597–609.
- [42] K. Wang, X. Geng, M. Chen, Riemann–Hilbert approach and long-time asymptotics of the positive flow short-pulse equation, Phys. D 439 (2022) 133383.
- [43] E.T. Whittaker, G.N. Watson, A Course of Modern Analysis, 4th ed. Cambridge University Press, Cambridge (1927).
- [44] C. Wu, B. Wei, C. Shi, B. Feng, Multi-breather solutions to the Sasa–Satsuma equation, Proc. R. Soc. A 478 (2022) 20210711.
- [45] J. Xu, E. Fan, The unified transform method for the Sasa–Satsuma equation on the half-line, Proc. R. Soc. A. 469 (2013) 20130068.
- [46] J. Xu, E. Fan, Long-time asymptotics for the Fokas–Lenells equation with decaying initial value problem: Without solitons, J. Differential Equations 259(3) (2015) 1098–1148.
- [47] J. Xu, Q. Zhu, E. Fan, The initial-boundary value problem for the Sasa–Satsuma equation on a finite interval via the Fokas method, J. Math. Phys. 59 (2018) 073508.
- [48] B. Yang, Y. Chen, High-order soliton matrices for Sasa–Satsuma equation via local Riemann–Hilbert problem, Nonlinear Anal. Real World Appl. 45 (2019) 918–941.
- [49] V.E. Zakharov, S.V. Manakov, Asymptotic behavior of nonlinear wave systems integrated by the inverse scattering method, Zh. Eksp. Teor. Fiz. 71 (1976) 203–215, Sov. Phys. JETP 44(1) (1976) 106–112.
- [50] H. Zhang, Y. Wang, W. Ma, Binary Darboux transformation for the coupled Sasa–Satsuma equations, Chaos 27 (2017) 073102.
- [51] X. Zhou, The Riemann–Hilbert problem and inverse scattering, SIAM J. Math. Anal. 20(4) (1989) 966–986.