A LWR model with constraints at moving interfaces
Abstract
We propose a mathematical framework to the study of scalar conservation laws with moving interfaces. This framework is developed on a LWR model with constraint on the flux along these moving interfaces. Existence is proved by means of a finite volume scheme. The originality lies in the local modification of the mesh and in the treatment of the crossing points of the trajectories.
Institut Denis Poisson, CNRS UMR 7013, Université de Tours, Université d’Orléans
Parc de Grandmont, 37200 Tours cedex, France
ORCID number: 0000-0003-1784-4878
2020 AMS Subject Classification: 35L65, 76A30, 65M08.
Keywords: Hyperbolic scalar conservation laws, moving interfaces, flux constraints, finite volume scheme.
1 Introduction
Being given a regular concave flux verifying
| (1.1) |
and a finite family of trajectories and constraints defined on (), we tackle the following problem:
| (1.2) |
Systems of the type (1.2) have naturally arisen in the recent years. Let us give a non-exhaustive review on how our Problem (1.2) relates to the existing literature.
-
•
The authors of [12, 15] considered a model very similar to (1.2). In their framework, represented the trajectories of autonomous vehicles, and the authors aimed at modeling the regulation impact on a few autonomous vehicles on the traffic flow. In the same framework but with different applications in mind, the model of [20] accounts for the boundedness of traffic acceleration. Note that in each of these models, the trajectories of the moving interfaces were not given a priori, but rather obtained as solutions to an ODE involving the density of traffic, a mechanism reminiscent of [2, 9, 21] for instance. Let us also mention the work of [16] where the authors studied a different model for the situation of several moving bottlenecks.
- •
- •
- •
In several of these works [15, 20], the existence issue is tackled using the wave-front tracking procedure which is very sensible to the details of the model. On the other hand, when numerical schemes are considered, see [10, 7], the numerical analysis is usually left out.
The contribution of this paper is to provide a robust mathematical setting both in the theoretical and numerical aspects of (1.2). The proof of uniqueness is based upon a combination of Kruzhkov classical method of doubling variables and the theory of dissipative germs in the framework of discontinuous flux [3], and it is analogous to the one of [4]. To prove existence, we build a finite volume scheme with a grid that adapts locally to the trajectories and to their crossing points, but remains a simple Cartesian grid away from the interfaces. Our work can serve as a basis for constructing solutions to more involved models, e.g. via the splitting approach. As an example of application, we can point out the variant of our recent work [21] with multiple slow vehicles involved; this is a mildly non-local analogue of the problem considered numerically in [10].
As the fundamental ingredient of the well-posedness proof and numerical approximation of (1.2), we will first tackle the one trajectory/one constraint problem:
| (1.3) |
with and . Models in the class of (1.3) have been greatly investigated in the past few decades. Motivated by the modeling of tollgates and traffic lights for instance, the authors of [8] considered (1.3) with the trivial trajectory and proved a well-posedness result in the framework (i.e. with both and with bounded variation, locally). The authors of [2] then extended the well-posedness in the framework and also constructed a convergent numerical scheme. More recently, in [9, 11, 21], the authors studied a variant of (1.3) in which and were coupled via an ODE. The coupling was thought to model the influence of a slow vehicle, traveling at speed , on road traffic.
The reduction of (1.2) to localized problem (1.3) requires the construction of a finite volume scheme in the original coordinates , while the treatment of (1.3) in the literature is most often based upon the rectification of the interface via a variable change, see [9, 11, 21]. For (1.2), this approach leads to a cumbersome and singular construction, see [4]. In our well-posedness analysis and approximation of (1.3), having in mind (1.2), we will not change the coordinate system.
Let us detail how the paper is organized. Sections 2-3 are devoted to Problem (1.3). We start by giving two definitions of solutions. One, most frequently used in traffic dynamics (see [8, 5]), is composed of classical Kruzhkov entropy inequalities with reminder term taking into account the constraint and of a weak formulation for the constraint, see Definition 2.1. The second definition emanates from the theory of conservation laws with dissipative interface coupling (see [3, 1]). It consists of Kruzhkov entropy inequalities with test functions that vanish along the interface and of an explicit treatment of the traces of the solution along the interface, see Definition 2.4. Before tackling the well-posedness issue, we prove that these two definitions are equivalent, see Propositions 2.6-2.6, similarly to what the authors of [2] did. Uniqueness follows from the stability obtained in Section 2, see Theorem 2.13. In Section 3, we construct a finite volume scheme for (1.3) and prove of its convergence. In the construction, we do not rectify the trajectory, but instead we locally modify the mesh to mold the trajectory. Moreover, we fully make use of techniques and results put forward by the author of [22] to derive localized estimates away from the interface, essential to obtain strong compactness for the approximate solutions created by the scheme, see Corollary 3.7. This is a way to highlight the generality of the compactness technique of [22].
In Section 4, we get back to the original problem (1.2). Our strategy is to assemble the study of (1.2) from several local studies of (1.3) with the help of a partition of unity argument. This concerns, in particular, the convergence of finite volume approximation of (1.2) which is addressed via a localization argument. However, the scheme needs to be defined globally, which makes it impossible to use the rectification strategy as soon as the interfaces have crossing points, see [4] for a singular rectification strategy.
2 Uniqueness and stability for the single trajectory problem
The content of this section is not original in the sense that it is a rigorous adaptation and assembling of existing techniques reminiscent of [24, 19, 8, 2, 3].
2.1 Equivalent definitions of solutions
Throughout the paper, for all , we denote by
the normal flux through () and its entropy flux associated with the Kruzhkov entropy , for all , see [19]. Let us also denote by the trajectory/interface:
Definition 2.1.
Let . We say that is an admissible entropy solution to (1.3) if
(i) for all test functions and , the following entropy inequalities are verified:
| (2.1) | ||||
where
(ii) for all test functions the following constraint inequalities are verified:
| (2.2) |
where .
Remark 2.1.
Taking , then in (2.1), from the condition a.e. we deduce that any admissible weak solution to Problem (1.3) is also a distributional solution to the conservation law . If is a regular enough solution, then for all test functions , we have
Moreover, if satisfies the flux inequality of (1.3) a.e. on , then the previous computations lead to
this is where inequalities (2.2) come from. Note how they make sense irrespective of the regularity of . Integrating on would lead to similar and equivalent inequalities.
Definition 2.1 is well suited for passage to the limit of a.e. convergent sequences of exact or approximate solutions. However, we cannot derive uniqueness by the standard arguments like in the classical case of Kruzhkov. Using an equivalent notion of solution, which we adapt from [3], based on explicit treatment of traces of on , we rather combine the arguments of [19] and [24]. In this definition a couple plays a major role, the one which realizes the equality in the flux constraint in (1.3). More precisely, fix first . By (1.1) and concavity of , for all , the equation admits exactly two solutions in , see Figure 1, left. The same way, if , then for all , the equation still admits two solutions in . The couple formed by these two solutions, denoted by in Definition 2.2 below, will serve both in the proof of uniqueness and existence.

Following the previous discussion, in the sequel, we will assume that verifies the following assumption:
| (2.3) |
In particular, remark that
| (2.4) |
Definition 2.2.
Let and , or and . The admissibility germ for the conservation law in (1.3) associated with the constraint is the subset defined as the union:
where, due to the bell-shaped profile of , the couple is uniquely defined by the conditions
Lemma 2.3.
For all and , and for all and , the admissibility germ is -dissipative in the sense that:
(i) for all , (Rankine-Hugoniot condition);
(ii) for all ,
| (2.5) |
Proof. The point (i) is obvious from the definition. Let us prove the dissipative feature (2.5). The following table summarizes which values can take the difference , depending on in which parts of the germ the couples belong to.
| or | |||
| or | |||
| or | or | or |
Having in mind the definition of , we can conclude that .
Definition 2.4.
Let . We say that is a -entropy solution to (1.3) if:
(i) for all test functions and , the following entropy inequalities are verified:
| (2.6) |
(ii) for a.e. ,
| (2.7) |
Remark 2.2.
Condition (2.7) is to be understood in the sense of strong traces along . An important fact we stress is that it is not restrictive to assume that entropy solutions, i.e. bounded functions verifying (2.6), admit strong traces. Usually, it is ensured provided a nondegeneracy assumption on the flux function:
| (2.8) |
In the context of traffic flow, however, we sometimes consider fluxes which do not verify (2.8). Such fluxes, which have linear parts, usually model constant traffic velocity for small densities. In those situations, and when , one can prove that under a mild assumption on the constraint, if the initial datum has bounded variation, then solutions to (1.3) are in , and traces are then to be understood in the sense of functions, see [21, Theorem 3.2]. Also note that the germ formalism can be adapted to the situations where the flux is degenerate and no variation bound is assumed, see [3, Remarks 2.2, 2.3].
Proposition 2.5.
Any admissible entropy solution to (1.3) is a -entropy solution.
Proof. Fix and let be an admissible entropy solution to (1.3). Let and . If vanishes along , then (2.1) becomes (2.6). Moreover, it is known that the Rankine-Hugoniot condition is contained in (2.1). Combining it with (2.2) gives us:
| (2.9) |
Let us show that for a.e. , .
Case 1: . Condition (2.9) implies that .
Case 2: . Suppose now that and fix . By a standard approximation argument, we can apply (2.1) with the Lipschitz test function , where is the cut-off function:
This yields:
Taking the limit when , we obtain:
which implies that for a.e. and for all ,
Taking in particular , we get:
| (2.10) |
Since , (2.10) leads to , which combined with (2.9), implies . We deduce that , which completes the proof.
Proposition 2.6.
Any -entropy solution to (1.3) is an admissible entropy solution.
Proof. Fix and let be a -entropy solution to (1.3). Let and . We still denote by the cut-off function from the last proof. We write . Since vanishes along , we have
Taking the limit when , we obtain:
To conclude, we are going to prove that for a.e. and for all , . Remember that by assumption, for a.e. , . The following table, in which we dropped the -indexing, summarizes which values can take the difference according to the position of with respect to the couple , which is simply denoted by . Note that the case marked by does not happen.
| between and |
|---|
2.2 Uniqueness of -entropy solutions
We now prove uniqueness using Definition 2.4.
Lemma 2.7 (Kato inequality).
Proof. Take with support contained in the set . The classical method of doubling variables leads us to:
| (2.12) | ||||
Again, a standard approximation argument allows us to apply (2.12) with the Lipschitz function
where , is a smooth approximation of the Dirac mass at the origin, and
Using the fact that for a.e. ,
we obtain:
and
Finally, since
we get (2.11) by assembling the above ingredients together.
Theorem 2.8.
Fix , , . We denote by a -entropy solution to (1.3). The same way, let be -entropy solution to Problem (1.3) with initial datum . We suppose that satisfy (2.3). Then for all , we have
| (2.13) |
In particular, Problem (1.3) admits at most one solution.
Proof. Fix , and set . Consider for all the function:
where is a smooth approximation of the sign function. The sequence is a smooth approximation of the characteristic function of the trapezoid
Let us apply Kato inequality (2.11) with . For all , we have
Then,
Finally, we have
Remark also that the choices of and imply that for all ,
Assembling the previous limits together, we get:
Note that for all and for all ,
Consequently, we have shown that
What is left to do is to take the limit when and to estimate the last two terms of the right-hand side of the previous inequality. The following table, in which we dropped the -indexing, summarizes which values can take the difference according to which parts of their respective germs the couples and , respectively denoted by and belong to.
| or | |||
We clearly see the bound , which leads us to (2.13), which clearly implies uniqueness. This concludes the proof.
3 Existence for the single trajectory problem
We build a simple finite volume scheme and prove its convergence to an admissible entropy solution to (1.3). From now on, we denote by
Fix and .
3.1 Adapted mesh and definition of the scheme
We start by defining the sequence of approximate slopes:
and the sequence of approximate trajectories:
Since converges in , converges to in .
The same way, we define , the sequence of approximate constraints:
which converges to in .
Remark 3.1.
With our choices, from (2.4), we deduce that
| (3.1) |
This fact will come in handy in the proof of stability for the scheme.
Fix now and a spatial mesh size with fixed, verifying the CFL condition
| (3.2) |
For all , there exists a unique index such that , see Figure 2. Introduce the sequence defined by
We define the cell grids:
where for all and , is the rectangle if , one of the parallelograms represented in Figure 2 if and the rectangle if .

We start by discretizing the initial datum with where for all , is its mean value on the cell . Clearly, for this choice, we have:
Let us denote by the Engquist-Osher numerical flux associated with and for all , be the Godunov flux associated with .
Fix . To simplify the reading, we introduce the notations:
| (3.3) |
We now proceed to the definition of the scheme. It comes from a discretization of the conservation law written in each volume control (, ). Away from the trajectory/constraint, it is the standard -point marching formula and when , we have to deal with both the constraint and the interface which is not vertical. Three cases have to be considered when describing the marching formula of the scheme, but we really give the details for only one of them.
Case 1: . This means that the line joining and crosses the line , see Figure 2. If , the conservation written in the rectangle is given by the standard equation:
| (3.4) |
From the conservation in the cell , we set:
| (3.5) |
This formula corresponds to the choice of putting the same value for on and on at time , i.e. . In the cell , the conservation takes the form:
| (3.6) |
Let us introduce the two functions
and
so that
| (3.7) |
The key point in the proofs of the next section (stability and discrete entropy inequalities) is that the functions and are nondecreasing with respect to their arguments, therefore the modification in (3.3) did not affect the monotonicity of the resulting scheme (3.4) – (3.6).
Finally, the approximate solution is defined almost everywhere on :
The other cases ( or ) follow from similar geometric considerations. Note that in the context of traffic dynamics, would be the trajectory of a stationary or a forward moving obstacle and therefore, we should have . This implies that for all , either or . This is why we will focus on the case presented in Figure 2.
3.2 Stability and discrete entropy inequalities
Proposition 3.1 ( stability).
Proof. Monotonicity. Fix . Clearly, the expression (3.4) allows us to express as a function of three values of in a nondrecreasing way, see the [13, Chapter 5] for instance. We now verify that the functions and are also nondecreasing. Let us detail the proof for . Recall that is Lipschitz continuous by construction, therefore we can study its monotonicity in terms of its a.e. derivatives. Making use of both the CFL condition (3.2) and of the monotonicity of and , for a.e. , we have
proving the monotonicity of . Similar computations show that is nondecreasing with respect to its arguments as well.
Stability. We now turn to the proof of (3.8), which is done by induction on . If , it is verified by
definition of . Suppose now that (3.8) holds for some integer and let us show
that it still holds for . Remark that and are stationary solutions to the scheme. It is obviously true in the case
(3.4). The definitions of and do not change this fact. For instance, since
and because of (3.1), we also have:
Similar computations would ensure that it holds also for . Using now the monotonicity of for instance, we deduce that
which concludes the induction argument. The remaining cases follow from similar computations.
Corollary 3.2 (Discrete entropy inequalities).
Fix , and . Then the numerical scheme (3.4) – (3.6) fulfills the following discrete entropy inequalities:
| (3.9) |
where and denote the numerical entropy fluxes:
Proof. This result is mostly a consequence of the scheme monotonicity. When the interface/constraint does not enter the calculations i.e. when , the proof follows [13, Lemma 5.4]. The key point is not only the monotonicity, but also the fact that in the classical case, all the constants states are stationary solutions of the scheme. This observation does not hold when the constraint enters the calculations. Suppose for example that (which corresponds to the function ). Here, we have
and it implies:
We deduce:
3.3 Continuous inequalities for the approximate solution
The next step of the reasoning is to derive analogous inequalities to (2.1)-(2.2), verified by the approximate solution , starting from (3.9) and (3.4) – (3.6).
In this section, we fix a test function and set:
We start by deriving continuous entropy inequalities verified by . Define the approximate entropy flux:
Proposition 3.3 (Approximate entropy inequalities).
Fix and . Then we have
| (3.10) | ||||
Proof. For all , we multiply the discrete entropy inequalities (3.9) by and take the sum to obtain:
This inequality can be rewritten as
with for all , . We now proceed to the Abel’s transformation and reorganize the terms of the inequality. This leads us to:
with for all , . We immediately see that
We conclude this proof by estimating the remaining terms of the inequality.
Estimating . First, note that
Since
we deduce the bound:
The same way, we would derive the estimation:
Estimating . We write:
with
and
Estimating . Finally, we have
with
Note that if is supported in time in , with , then by summing (3.10) over , we obtain (recall that is fixed):
| (3.11) | ||||
We now turn to the proof of an approximate version of (2.2). Let us define the approximate flux function:
Proposition 3.4 (Approximate constraint inequalities).
Fix and . Then we have
| (3.12) | ||||
Proof. Following the steps of the proof of Proposition 3.3, we first multiply the scheme (3.4)-(3.6) by , sum over and then apply the summation by parts procedure. This time, we obtain:
with . Clearly,
and estimate (3.12) follows from the bounds:
If is supported in time in , with , then by summing (3.10) over , we obtain:
| (3.13) |
3.4 Compactness and convergence
The remaining part of the reasoning consists in obtaining sufficient compactness for the sequence in order to pass to the limit in (3.11)-(3.13). To doing so, we adapt techniques and results put forward by Towers in [22]. With this in mind, we suppose in this section that the flux function, still bell-shaped, is such that
| (3.14) |
We denote for all and ,
We will also use the notation
In [22], the author dealt with a discontinuous in both time and space flux and the specific “vanishing viscosity” coupling at the interface. The discontinuity in space was localized along the curve . Here, we deal with a smooth flux, but we have a flux constraint along the curve . The applicability of the technique of [22] for our case with moving interface and flux-constrained interface coupling relies on the fact that one can derive a bound on as long as the interface does not enter the calculations for i.e. as long as in the case .
Lemma 3.5.
Let , , and . Then
| (3.15) |
Proof. For the sake of completeness, the proof, largely inspired by [22], can be found in Appendix A.
Remark 3.2.
Fix and . Remark that if , then we can write that for some , we have
Corollary 3.6.

Proof. Fix . We only prove (3.16) in the cases . The reasoning for the cases is very similar. Let us first prove by induction on that
| (3.17) |
If , then . Otherwise, we can write:
Since
we deduce that , hence, using the induction property:
which concludes the induction argument. Estimates (3.16) in the cases follow for suitable choices of in (3.17).
Corollary 3.7 (Localized estimates).
Fix and suppose that and that . Then there exists a constant , nondecreasing with respect to its arguments such that
| (3.18) |
and
| (3.19) |
Note that we have the same bounds for the quantities:
Proof. Let such that and . We have:
Now, for all , we have
Lemma 3.16 ensures that
However, we also have:
We deduce that for all , we have . Therefore,
which is exactly (3.18). Then,
concluding the proof.
Theorem 3.8.
Proof. Fix . The uniform convergence of to , coupled with the bounds (3.18)-(3.19) and the uniform bound (3.8) provide (up to a subsequence) a.e. convergence for the sequence in any rectangular bounded domains of the open subset
see [17, Appendix A]. The a.e. convergence on any compact subsets of follows by a classical covering argument. Then a diagonal procedure provides the a.e. convergence on any compact subsets of . A further extraction yields the a.e. convergence on .
Equipped with the convergence of to , we let in (3.11) and (3.13) to establish that is an admissible entropy solution to (1.3). By uniqueness, the whole sequence converges to , which proves the theorem.
Corollary 3.9.
4 Well-posedness for the multiple trajectory problem
We now get back to the original problem (1.2). Let us detail the organization of this section. First, we construct a partition of the unity to reduce the study of (1.2) to an assembling of several local studies of (1.3), see Section 4.1. Using the definition based on germs, analogous to Definition 2.4, we will prove a stability estimate, leading to uniqueness, see Theorem 4.3. Then in Section 4.3, we construct a finite volume scheme in which we fully use the precise study of Section 3. A special treatment of the crossing points is described, see Section 4.3.1.
Let us recall that we are given a finite (or more generally locally finite) family of trajectories and constraints defined on (). Introduce the notations:
We suppose that for all , and . This notation means that what can be seen as crossing points between interfaces will be considered as endpoints of the interfaces; for instance, given two crossing lines, we split them into four interfaces having a common endpoint. We denote by the set of all endpoints of the interfaces , .
4.1 Reduction to a single interface
Fix . Let us denote by the compact support of .
Step 1. For all , is a compact subset (maybe empty) of , and the family is pairwise disjoint. By compactness,
Step 2. For all , set
where denotes the -euclidean open ball centered on and of radius . Clearly, is an open subset of containing . Moreover, the family is pairwise disjoint. Indeed, suppose instead that for some (), we have , and fix . By definition, there exists and such that
Using the triangle inequality, we deduce that
yielding the contradiction.
Step 3. Define the open subset (finite intersection of open subsets):
The family is an open covering of . Consequently, there exists a partition of the unity associated with this covering:
Step 4. We write the function in the following manner:
| (4.1) |
Note that:
-
1.
vanishes along all the interfaces;
-
2.
for all , vanishes along all the interfaces but .
4.2 Definition of solutions and uniqueness
Definition 4.1.
Let . We say that is a -entropy solution to (1.2) if:
(i) for all test functions and , the following entropy inequalities are verified:
| (4.2) |
(ii) for all and for a.e. ,
| (4.3) |
where the admissibility germ is defined in Definition 2.2.
Lemma 4.2 (Kato inequality).
Fix . Let and be two family of constraints, where for all , , . We denote by (resp. ) a -entropy solution to Problem (1.2) corresponding to initial datum (resp. ) and constraints (resp. ). Then for all test functions , we have
| (4.4) | ||||
Proof. We split the reasoning in two steps.
Step 1. Suppose first that . In this case, we write using the partition of unity (4.1). Fix . Following the computations of Lemma 2.7, we obtain:
| (4.5) | ||||
Now, since vanishes along all the interfaces, standard computations lead to
| (4.6) |
Step 2. Consider now . Fix . From the first step, a classical approximation argument allows us to apply (4.4) with the Lipschitz test function
where for all ,
where, by analogy with the proof of Lemma 2.7, denotes the distance associated with the norm . We let , keeping in mind that:
Straightforward computations lead to (4.4) with , concluding the proof.
Theorem 4.3.
Fix . Let and be two family of constraints, where for all , , . We denote by (resp. ) a -entropy solution to Problem (1.2) corresponding to initial datum (resp. ) and constraints (resp. ). Then for all , we have
| (4.7) |
In particular, Problem (1.2) admits at most one -entropy solution.
Proof. Estimate (4.7) follows from Kato inequality (4.4) with a suitable choice of test function and in light of the inequality:
see Theorem 2.8 and its proof.
4.3 Proof of existence
Following the reasoning of Sections 2-3, we introduce a second definition of solutions, more suitable to prove existence.
Definition 4.4.
Let . We say that is an admissible entropy solution to (1.2) if
(i) for all test functions and , the following entropy inequalities are verified:
| (4.8) | ||||
where is defined in Definition 2.1 ;
(ii) for all test functions , written under the form (4.1), the following constraint inequalities are verified for all :
| (4.9) |
where .
Proposition 4.5.
Proof. The proof of the equivalence of Definitions 4.1 and 4.4 is a straightforward adaptation of the proofs of Propositions 2.5-2.6. The last part of the statement follows using the same approximation argument described at the end of the proof of Lemma 4.2.
Let us now turn to the proof of existence for admissible entropy solutions of (1.2). We make use of the precise study of Section 3 in the case of a single trajectory and build a finite volume scheme. We keep the notations of Section 3 when there is no ambiguity.
4.3.1 Construction of the mesh, definition of the scheme
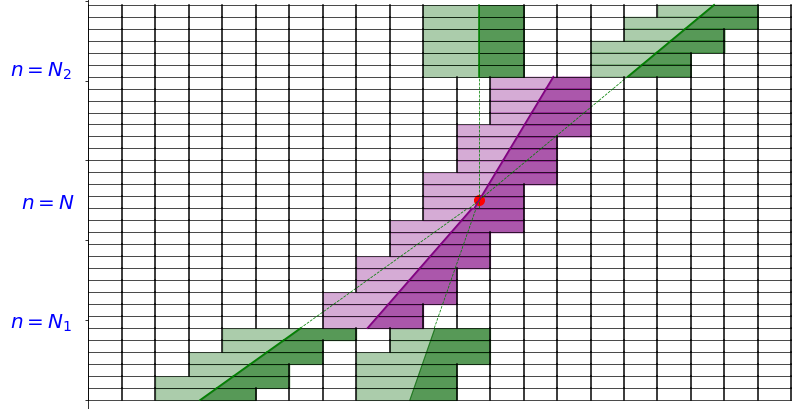
For the sake of clarity, suppose that we only have two trajectories/constraints , , defined on , which cross at time . We denote by this crossing point. Suppose also that this crossing point results in two additional trajectories/constraints , , defined on , and which do not cross, as represented in Figure 4.
Let us fully make explicit the steps of the reasoning leading to the construction of our scheme in that situation. Suppose that is fixed and verifies the CFL condition
| (4.10) |
Set such that . We divide the discussion in four parts.
Part 1. Introduce the number
The definition of ensures that for all , we can independently modify the mesh near the two trajectories and , as presented in Figure 5.
Consequently, we can simply define the approximate solution on as the finite volume approximation of a conservation law, with initial datum , with flux constraints on two non-interacting trajectories, using the recipe of Section 3 for each trajectory/constraint.

Part 2. Fix now . In these time intervals, since the two trajectories are too close to each other, one cannot modify the mesh in the neighborhood of one of them without affecting the other. However, the scheme has to be defined globally, so we proceed as described below.
-
•
First, introduce the mean trajectory and the new constraint:
-
•
Then, define on as the finite volume approximation of the one trajectory/one constraint problem:
using exactly the recipe of Section 3.1.
Part 3. Introduce the number:
For , we are in the same situation as Part 2. We proceed to the same construction, mutatis mutandis.
-
•
As in Part 2, define the mean trajectory and the new constraint:
represented in purple in Figure 5, after the crossing point.
-
•
Define on as the finite volume approximation of the one trajectory/one constraint problem:
Part 4. Finally, is defined on like in Part 1 with (resp. ) playing the role of (resp. of ).
Remark 4.1.
Let us stress out that the details of the treatment done in Parts 2-3 do not play any significant role in the convergence proof below thanks to the choice of test functions vanishing at neighborhood of the crossing points, see Proposition 4.5. Consequently, taking the mean trajectory and the minimum of the constraint is merely an example aiming at preserving some consistency while keeping the scheme simple to understand and implement.
The general case of a finite number of interfaces (locally finite number can be easily included) is treated in the same way, leading to a pattern with the uniform rectangular mesh adapted to each of the interfaces , except for small (in terms of the number of impacted mesh cells) neighborhoods of the crossing points , .
4.3.2 Proof of convergence
Theorem 4.6.
Proof. We make use of the fact that in Definition 4.4, we only need to consider test functions that vanish at a neighborhood of the crossing points (this is the key observation leading to Remark 4.1 here above).
(i) Proof of the entropy inequalities. Fix , written as , using the appropriate partition of unity, see Section 4.1. Since vanishes along all the interfaces, verifies inequality (3.11) with on the domain and with test function . Indeed, for a sufficiently small , the scheme we constructed in the previous section reduces to a standard finite volume in . Fix now . Since vanishes along all the interfaces but , verifies inequality (3.11) with reminder term along the trajectory on the domain and with test function , due to the analysis of Section 3; indeed, in the support of the test function, our scheme for the multi-interface problem reduces to the scheme for the single-interface problem. By summing these previous inequalities, we obtain an approximate version of (4.8) verified by :
| (4.11) | ||||
(ii) Proof of the weak constraint inequalities. Let , written under the form (4.1). Fix . Since vanishes along all the interfaces but , for a sufficiently small , verifies inequality (3.13) with constraint along the trajectory on the domain and with test function . We obtain an approximate version of (4.12) verified by :
| (4.12) |
(iii) Compactness and convergence. Compactness of the sequence follows directly from the study of Section 3.4 where we derived local bounds for under the assumption (3.14). Indeed, these local bounds lead to compactness in the domain complementary to the interfaces, we only use the fact that the interfaces together with the crossing points form a closed subset of with zero Lebesgue measure. Once the a.e. convergence (up to a subsequence) on to some obtained, we simply pass to the limit in (4.11)-(4.12). This proves that is an admissible solution to (1.2). By the uniqueness of Theorem 4.3, the whole sequence converges to . This concludes the proof.
Corollary 4.7.
Fix , satisfying (1.1)-(3.14) and . Let be a finite family of trajectories and constraints defined on (). We suppose that for all , and . Suppose also that the interfaces defined by the trajectories have a finite number of crossing points. Then Problem (1.2) admits a unique admissible entropy solution.
5 Numerical experiment with crossing trajectories
In this section, we perform a numerical test to illustrate the scheme analyzed in Section 3 and Section 4.3. We take the GNL flux .
We model the following situation. A vehicle breaks down on a road and reduces by half the surrounding traffic flow, which initial state is given by . At some point, a tow truck comes to move the immobile vehicle. We summarized this situation in Figure 6. Notice the time interval in which . This corresponds to the time needed for the tow truck to move the vehicle. Remark also that the value of the constraint on this time interval is smaller than the one when only the broken down vehicle was reducing the traffic flow.

The evolution of the numerical solution is represented in Figure 7. Let us comment on the profile of the numerical solution.
-
•
At first (), the solution is composed of traveling waves separated by a stationary non-classical shock located at the immobile vehicle position.
-
•
When the tow truck catches up with the vehicle (), the profile of the numerical solution is the same, but the greater value of the constraint in this time interval changes the magnitude of the non-classical shock; at this point the combined presence of both the tow truck and the immobile vehicle clogs the traffic flow even more.
-
•
Finally, once the tow truck starts again (), the traffic congestion is reduced.
Notice at time the small artifact (circled in red in Figure 7) created by Parts 2-3 in the construction of the approximate solution and reproduced by the scheme. This highlights the fact that even if the treatment of the crossing points brings inconsistencies or artifacts to the numerical solution, these undesired effects are not amplified by the scheme, and become negligible when one refines the mesh.

Appendix A Proof of the OSL bound
We prove in this appendix Lemma 3.5. All the notations are taken from Sections 3.1 and 3.4. The proof is a simple rewriting of the proof of [22, Lemma 4.2].
It will be convenient to write the Engquist-Osher flux under the form:
so that for all , when , the scheme (3.4) can be rewritten as:
| (A.1) |
Lemma A.1.
For all and , we have
| (A.2) |
Proof. Indeed, using first the uniform convexity of and then the CFL condition (3.2), we can write:
from which we deduce (A.2).
Lemma A.2.
Let , , and . Then
| (A.3) |
Proof. We divide the proof in three steps.
Step 1: The function is nonnegative on and nondecreasing on . Note that by (A.2), , which will allow us to use the monotonicity of .
Step 2. We assume that
| (A.4) |
and we are going to prove that (A.3) holds. Using the uniform concavity assumption of , we can write that
| (A.5) |
A similar inequality holds for as well. Using (A.1), we obtain:
| (A.6) | ||||
where the last inequality comes from using (A.5). The proof now reduces to four cases, depending on the ordering of , and .
where the last inequality comes from the bound: . The CFL condition (3.2) ensures that the two first terms of the right-hand side of the last inequality are a convex combination of and . Consequently, inequality (A.7) then becomes
Since , the monotonicity of ensures that
Since the right-hand side of this inequality is nonnegative, we can replace its left-hand side by , which concludes the proof in this case.
Case 2: . The proof of in this case similar to the last one so we omit the details.
Case 3: . Under Assumption (A.4), we have the following ordering:
Inequality (A.6) becomes
where we used the inequality . From here, we can conclude as in Case 1.
Case 4: . Using the decomposition
inequality (A.6) becomes
| (A.8) | ||||
The CFL condition (3.2) and the ordering result in
so we can replace (A.8) by
and we exploit the monotonicity of to conclude.
Step 3: We no longer assume (A.4), and we get back to the general case. Let us introduce
and
Using the monotonicity of , we get:
Since and , Step 2 ensures that
Clearly,
Using the monotonicity of , we get:
concluding the proof.
References
- [1] B. Andreianov. New approaches to describing admissibility of solutions of scalar conservation laws with discontinuous flux. ESAIM: Proceedings and Surveys, 50:40–65, 2015.
- [2] B. Andreianov, P. Goatin, and N. Seguin. Finite volume schemes for locally constrained conservation laws. Numerische Mathematik, 115(4):609–645, 2010.
- [3] B. Andreianov, K. Karlsen, and N. H. Risebro. A theory of -dissipative solvers for scalar conservation laws with discontinuous flux. Archive for Rational Mechanics and Analysis, 201(1):27–86, 2011.
- [4] B. Andreianov and D. Mitrović. Entropy conditions for scalar conservation laws with discontinuous flux revisited. Ann. Inst. H. Poincaré Anal. Non Linéaire, 32(6):1307–1335, 2015.
- [5] B. Andreianov and A. Sylla. A macroscopic model to reproduce self-organization at bottlenecks. In International Conference on Finite Volumes for Complex Applications, pages 243–254. Springer, 2020.
- [6] A. Bressan, G. Guerra, and W. Shen. Vanishing viscosity solutions for conservation laws with regulated flux. Journal of Differential Equations, 266(1):312–351, 2019.
- [7] C. Chalons, M. L. Delle Monache, and P. Goatin. A conservative scheme for non-classical solutions to a strongly coupled pde-ode problem. Interfaces and Free Boundaries, 19(4):553–570, 2018.
- [8] R. M. Colombo and P. Goatin. A well posed conservation law with a variable unilateral constraint. Journal of Differential Equations, 234(2):654–675, 2007.
- [9] M. L. Delle Monache and P. Goatin. Scalar conservation laws with moving constraints arising in traffic flow modeling: an existence result. Journal of Differential Equations, 257(11):4015––4029, 2014.
- [10] M. L. Delle Monache and P. Goatin. A numerical scheme for moving bottlenecks in traffic flow. Bulletin of the Brazilian Mathematical Society, New Series, 47(2):605–617, 2016.
- [11] M. L. Delle Monache and P. Goatin. Stability estimates for scalar conservation laws with moving flux constraints. Networks and Heterogeneous Media, 12(2):245–258, 2017.
- [12] M. L. Delle Monache, T. Liard, B. Piccoli, R. Stern, and D. Work. Traffic reconstruction using autonomous vehicles. SIAM Journal on Applied Mathematics, 79(5):1748–1767, 2019.
- [13] R. Eymard, T. Gallouët, and R. Herbin. Finite Volume Methods, volume VII of Handbook of Numerical Analysis. North-Holland, Amsterdam, 2000.
- [14] A. Ferrara, P. Goatin, and G. Piacentini. A macroscopic model for platooning in highway traffic. SIAM Journal on Applied Mathematics, 80(1):639–656, 2020.
- [15] M. Garavello, P. Goatin, T. Liard, and B. Piccoli. A multiscale model for traffic regulation via autonomous vehicles. Journal of Differential Equations, 269(7):6088–6124, 2020.
- [16] I. Gasser, C. Lattanzio, and A. Maurizi. Vehicular traffic flow dynamics on a bus route. Multiscale Modeling & Simulation, 11(3):925–942, 2013.
- [17] H. Holden and N. H. Risebro. Front Tracking for Hyperbolic Conservation Laws, volume 152 of Applied Mathematical Sciences. Springer-Verlag New York, 2002.
- [18] K. H. Karlsen and J. D. Towers. Convergence of the lax-friedrichs scheme and stability for conservation laws with a discontinuous space-time dependent flux. Chinese Annals of Mathematics, 25(03):287–318, 2004.
- [19] S. N. Kruzhkov. First order quasilinear equations with several independent variables. Mathematics of the USSR-Sbornik, 81(123):228–255, 1970.
- [20] N. Laurent-Brouty, G. Costeseque, and P. Goatin. A macroscopic traffic flow model accounting for bounded acceleration. SIAM Journal on Applied Mathematics, 81(1):173–189, 2021.
- [21] A. Sylla. Influence of a slow moving vehicle on traffic: Well-posedness and approximation for a mildly nonlocal model. Networks & Heterogeneous Media, 16(2):221–256, 2021.
- [22] J. D. Towers. Convergence via OSLC of the Godunov scheme for a scalar conservation law with time and space flux discontinuities. Numerische Mathematik, 139(4):939–969, 2018.
- [23] J. D. Towers. An existence result for conservation laws having BV spatial flux heterogeneities-without concavity. Journal of Differential Equations, 269(7):5754–5764, 2020.
- [24] A. I. Vol’pert. The spaces BV and quasilinear equations. Matematicheskii Sbornik, 115(2):255–302, 1967.