A group theoretical approach to elasticity under constraints and predeformations
Abstract
Respecting deformational constraints and predeformations poses a substantial challenge in the description of nonlinear elasticity. We here outline how group theory can play a beneficial role to overcome this challenge. Specifically, group theory guides us to generalized definitions of nonlinear shear deformation gradients and expressions of generalized elastic moduli in the nonlinear regime. Particularly, such achievements become important in the context of larger deformations under constraints and additional deformations on top of predeformations.
Finite deformations of solid materials require quantification in terms of nonlinear elasticity [1, 2, 3]. Ubiquitous examples of elastic materials that are commonly exposed to significant strains include, but are not limited to, strained-layer semiconductor heterostructures [4, 5], metallic alloys [6] including gum metals [7, 8], two-dimensional materials [9], in particular, monolayer graphenes [10, 11] (for its composites see, e.g., Ref. [12]), and carbon nanotubes [13, 14]. In theoretical perspective, while ab initio calculation with the aids of density functional theory and molecular dynamics simulations are among the most frequently employed numerical approaches [13, 15, 16], the Eulerian or Lagrangian strain tensors offer a continuum mechanical framework [17, 16, 18] to address nonlinear elastic behaviors of solids. Frequently, such systems are addressed or applied under maintained deformational constraints or prestrains [19, 20, 21, 22, 23]. Then, the considered reference state does not correspond to the natural relaxed configuration any longer.
To characterize the stress-strain relation for small superimposed deviations in strain from the current state of the material, it is imperative to determine corresponding elastic moduli. In a quantitative description, one is then tempted to simply superimpose linearized forms of strain or deformation tensors [24, 25] to the already deformed state. However, even in the limit of infinitesimal superimposed strains, such linearizations in terms of linear elasticity theory imply inconsistencies. Basic examples are included below. The reason hides in the overall finite degree of deformation that changes under the additional strain, which is not fully resolved by superimposing linearized infinitesimal strains. Thus, we need to identify a formulation of the problem that consistently describes small-amplitude deformations in combination with nonlinear elasticity theory.
This conception naturally takes us to group theory. At its core, we find the linking of infinitesimal and finite elements. More precisely, finite elements are constructed (“generated”) from infinitesimal elements (“generators”) [26, 27, 28]. As we demonstrate and illustrate, a consistent nonlinear elasticity theory can be formulated accordingly that naturally incorporates evaluations in constrained and predeformed states. Appropriate expressions for elastic moduli in such situations are derived.
We start with an intuitive illustration in two dimensions. For simplicity, we confine ourselves to spatially homogeneous deformations. So-called hyperelastic materials are addressed, the stress-strain relation of which derives from a strain energy density function [29]. Here, represents the deformation gradient tensor. If and denote the positions of the material elements before and during deformation, respectively, then . As an example, we consider a predeformation in the form of isotropic compression or dilation of amplitude ,
| (1) |
. Maintaining this predeformed state can be regarded as a constraint. We refer to the neo-Hookean energy density [3]
| (2) |
where , and are the elastic Lamé coefficients, while T and indicate transpose and matrix multiplication, respectively.
If we now wish to superimpose to this predeformation a rotation by a small rotation angle , one is tempted to use the linearized form [30, 25, 31]
| (3) |
However, we recognize that this form is insufficient under predeformation. Particularly, it leads for to an energy difference
| (4) |
This contradicts the actual , which is expected for pure rigid rotations in isotropic space. We note that the problem is solved by using instead the actual rotation matrix to nonlinear order in ,
| (5) |
Then correctly .
Here, rectification was straightforward, because the nonlinear expression of the rotation matrix is widely known. Yet, in general, how can we find the correct nonlinear expression for the deformation gradient tensors? Obviously, this is necessary to obtain the correct result in nonlinear elasticity theory under predeformation or other external constraints.
We find that group theory provides an answer. In two dimensions, deformation gradients are represented as invertible matrices. Their determinants are all equal to unity, if we keep the above constraint of preserved volume while the predeformation is maintained. The deformation gradient tensors of strain and rotation are elements of the special linear group , with regular matrix multiplication and matrix inversion as group operations. The corresponding infinitesimal generators are written as
| (12) |
We notice that the rotation matrix in Eq. (5) can be obtained systematically from the generator as . Its action for a quadratic example system is illustrated in Fig. 1(a). To linear order in , we obtain in Eq. (3).
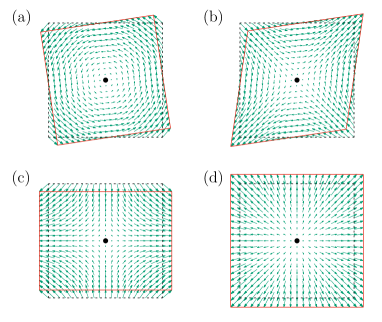
This insight guides the way to generate further deformation gradient tensors involving the other generators. For instance, is associated with shear. Ad hoc, we might formulate a corresponding linearized deformation gradient tensor as
| (13) |
which indeed is useful in the absence of predeformations. However, if this deformation is superimposed to the predeformation , the energy difference is found as
| (14) |
This expression can even become negative for , which would indicate energetically unstable situations, together with negative shear moduli.
To find the correct nonlinear expression , in analogy to , we generate it from as
| (17) |
Indeed, we then obtain . The associated shear deformation is depicted in Fig. 1(b), while generates a shear deformation of different orientation, see Fig. 1(c). If volume changes are permitted, another generator , denoting the unit matrix, needs to be added. From there, in Eq. (1) can be generated, see Fig. 1(d). Obviously, under constraints and finite predeformations, superimposed deformation gradients need to be considered to nonlinear order. Frequently, in nonlinear theories, such constraints are handled with the aid of the method of Lagrange multipliers [1, 32, 33]. Yet, this introduces additional parameters and equations. In Hamiltonian mechanics for particles, constraints can be eliminated from the theory by introducing generalized coordinates [34]. However, this affords to first identify an appropriate set of generalized coordinates. Using group theory, we here introduce a systematic way to handle nonlinear, finite elastic deformations, possibly subject to deformational constraints.
Importantly, because of the constraints, the space of deformation gradient tensors is not Euclidean but a manifold. More precisely, elasticity theory becomes based on manifolds of the general linear group , i.e., , where denotes the dimension. Our approach is based on Lie algebra.
We now extend the above considerations to three dimensions. The Lie algebra of the group is the set of all matrices, together with a Lie bracket operation, here the commutation relation . By the set we denote the three-dimensional generators, here selected as [35]
| (18) |
which generates compressions or dilations, and
| (25) | ||||
| (32) | ||||
| (39) | ||||
| (46) |
The latter eight traceless matrices form a basis for the special linear Lie algebra [36]. Specifically, generates stretches or compressions along the axis with compressions or stretches along the axis, respectively; generates stretches or compressions along the and axes with compressions or stretches of twice the magnitude along the axis, respectively; , , and generate rotations in the , , and plane, respectively; , , and generate shear deformations in the , , and plane, respectively. can also be regarded to generate a shear deformation in the plane as , but with different orientation.
Using the exponential map [26, 28], we can now generate finite deformation gradient tensors from ,
| (47) |
if the matrix logarithm of exists. This is the case around , i.e., for a set of finite but small coefficients. Otherwise, we may obtain the deformation gradients from matrix multiplications of exponential maps [28], i.e., . Exploiting the fact that generators provide linearly independent elements, a finite deformation may be decomposed into components. For instance, based on Lie algebra, one can consider as a superposition of a dilation (or compression) with the strength of , and a rotation and a shear deformation in the plane with strengths and , respectively, which is distinguished from conventional decompositions in terms of deformation gradient tensors. Indeed, direct decompositions of deformation gradient tensors in the form of , see, e.g., Ref. [37], are not allowed in general, as generators mostly do not commute. Rather than that, a deformation should be divided into many pieces of infinitesimal deformations due to the Lie product formula [28].
Using the generators, our next step is to derive appropriate expressions for the elastic moduli and rotation coefficients for a system in a constrained or predeformed state. We introduce a vector notation and under a finite predeformation expand in terms of as
| (48) |
where and for we have
| (49) |
The vector , conjugate to , quantifies the stress under a constraint or predeformation.
Generally, a carefully selected basis may support the description of the problem. For instance, fixing the volume in the predeformed state can simply be achieved by omitting the component . Linear algebra allows to adjust the basis to the problem at hand. Specifically, unitary operators that connect two different bases via imply
| (50) |
where and .
In what follows, we investigate the roles that and play in the context of appropriate elastic moduli for nonlinear elasticity theory. We use Einstein’s summation convention and denote as the Cauchy stress tensor, which is given by
| (51) |
for hyperelastic materials. From Eq. (49), we find in coordinates associated with the deformed state [1]
| (52) |
Since we are working with matrix Lie groups, we may insert the expression [27, 28]
| (53) |
where , , and . Particularly, Eq. (52) connects the newly defined first-order coefficients and the Cauchy stress tensor. For example, we obtain
| (54) |
because and consequently , while denotes the generalized pressure.
Analogously, we obtain for the second-order coefficients, which we now call generalized elastic moduli,
| (55) |
Here, represents the fourth-rank tensor of classic elastic moduli with components
| (56) |
They completely determine in the absence of any predeformation, i.e., for . In this case, the form of , and subsequently of is fully determined by irreducible representations in linear elasticity, see, e.g., Ref. [38]. Otherwise, the second-order derivatives are calculated via [27, 28]
| (57) |
We note that our expression for in Eq. (55) corresponds to a type of tangent moduli [39] quantifying elastic moduli in predeformed states, but automatically satisfies imposed constraints if an appropriate set of generators is chosen. Remarkably, the newly derived corrections due to imposed predeformations given by the second term in Eq. (55), together with associated with the ground-state symmetry, provide irreducible representations of nonlinear elastic moduli extended to general states of systems.
For simplicity, we henceforth confine ourselves to infinitesimal volume-preserving deformations with . Then, from Eqs. (47) and (52) we find
| (58) |
For unconstrained systems, the Cauchy stress tensor can be decomposed into the one for incompressible systems and an -term as , see Eq. (54), in line with the method of Lagrange multipliers [1]. Moreover, the generalized elastic moduli in Eq. (55) via Eq. (A group theoretical approach to elasticity under constraints and predeformations) reduce to
| (59) |
In this expression, denote the anticommutation relations. It is straightforward to calculate them from Eqs. (18) and (25). They can be rewritten in the form , where and represent the so-called structure constants for the associated Lie algebra, here , that can be calculated explicitly. Thus we obtain from Eqs. (54), (58), and (59)
| (60) |
The first contribution, in terms of the matrix components for , related to both prestressed and nonprestressed systems, takes the form
| (69) |
The square root appears because of the definition of in Eq. (18) that indicates the square root as a prefactor. The second contribution in Eq. (60), which needs to be taken into account in the case of prestressed systems, reads
| (78) |
Together, Eqs. (60)–(78) conclude our derivation of the generalized elastic moduli . They follow in a systematic way using group theory. Beyond the pure classic elastic moduli associated with , see Eq. (56), Eq. (60) contains the contributions through the predeformation via the Cauchy stresses , see Eqs. (54) and (58). The tensor still refers to all modes of deformation, including the ones that actually are restricted by the imposed constraints. Our formalism consistently includes the consequences of these constraints into the overall expression for the generalized elastic moduli . Moreover, as a strong benefit, the factors can be directly read off from an expansion of the deformation energy in a suitable basis adjusted to the constraints, see Eqs. (48) and (50). For situations of completely constrained volume, the contributions by and may simply be dropped.
For a brief illustration of our formalism, we return to Eq. (2) in two dimensions and supplement it as [40, 41]
| (79) | |||||
The last term includes the orientation of an internal axis that is reoriented by and coupled to an external field . Together with the predeformation in Eq. (1), we consider , while imposing for a constraint of preserved volume.
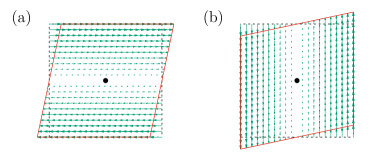
A second set of generators
| (84) |
is used besides Eq. (12), where and generate frequently considered simple shears [25], see Fig. 2(a) and (b), respectively. The unitary matrix
| (88) |
connects the two sets of generators and resulting quantities to each other, as detailed around Eq. (50). In this way, using our formalism, we readily find the results associated with the types of deformation depicted in Fig. 2 as well. Evaluating the analog of Eq. (47) in our two-dimensional setting, we find
| (93) |
Together with
| (94) |
, this allows to evaluate Eq. (79).
Noting that and setting and , we obtain from Eq. (79) up to second order in and , respectively,
| (95) | |||||
and
| (96) | |||||
On the one hand, comparison with Eqs. (48) and (50) allows to directly read off () together with the generalized moduli
| (97) |
and
| (98) |
In this way, the linear transformation rules below Eq. (50) can directly be verified using Eq. (88). Consequently, this example demonstrates how results for different sets of generators of deformation can readily be obtained from each other.
On the other hand, we may now determine the generalized elastic moduli from our theory using the two-dimensional analogs of Eqs. (59) and (60). Specifically, from explicit calculation for the associated Lie algebra with the generators and for given by Eq. (12), we obtain
| (102) |
For this purpose, we additionally need to calculate . As a two-dimensional analog of Eq. (54), together with the generator , we obtain
| (103) |
Thus, we find in two dimensions
| (104) | ||||
| (105) | ||||
| (106) | ||||
| (107) |
The newly defined rotation coefficient is linked to rotations generated from , see Fig. 1(a). Likewise, the shear modulus is linked to shear deformations generated from , see Fig. 1(b). They are now directly obtained in an economic way from Eqs. (104) and (105) via Eqs. (A group theoretical approach to elasticity under constraints and predeformations) and (103). The explicit components of are not needed to this end. Yet, they can be calculated from an expansion of in components of and using Eq. (56) to confirm our expressions.
To summarize our results and illustration, group theory has guided us to an appropriate formulation of nonlinear elasticity under imposed constraints and finite predeformations. Our deformation gradient tensors are constructed consistently from generators, which identifies appropriate expressions. Additional distortions superimposed to finite predeformations, even regarding certain constraints, are in this way described consistently, with consequences even in the infinitesimal limit. Using unitary transformations, the framework is adjusted to the type of deformation at hand. In the limit of infinitesimal superimposed distortions, our theory provides appropriate expressions of generalized elastic moduli and rotation coefficients.
In addition to our theoretical advance, it is important to discuss possible applications of the formulation to real systems. Obviously, our approach should prove (technically) useful in any situation where materials under predeformation or constraints are exposed to external or internal stimuli. It will also be illuminating to extend our description to corresponding dynamic scenarios as well as to nonaffine deformations in combination with computational evaluations. Moreover, in addition to conventional solids, various soft and living matters [32, 42, 43, 44, 45] can be modeled as nonlinear elastic materials. For example, nematic gels and elastomers [42, 46] can be investigated by our formalism, for which an extension to systems of anisotropic elasticity should be envisaged.
Beyond the technical advance, our approach may open a new avenue to investigate nontypical solids. Since the stress vector has been defined as a conjugate to deformation, our group theoretical approach should be useful to characterize active systems [47, 48], in which (active) forces instead of deformations are directly expressed by the system. While we have discussed our formulation in the context of continuum theory, it is straightforward to extend our approach to particle-based models and discretized systems. Since an implementation of constraints in this case is not as obvious as in continuum models due to fluctuations, our formulation might be relevant for molecular dynamics and Monte-Carlo simulations [49, 50] under constraints and predeformations.
Acknowledgements.
H.L. was supported by the Deutsche Forschungsgemeinschaft (German Research Foundation, DFG) within the project LO 418/25-1. A.M.M. thanks the Deutsche Forschungsgemeinschaft (German Research Foundation, DFG) for support through the Heisenberg Grant ME 3571/4-1.References
- Ogden [1984] R. W. Ogden, Non-linear Elastic Deformations (Ellis Horwood, Chichester, England, 1984).
- Truesdell and Noll [2004] C. Truesdell and W. Noll, The Non-Linear Field Theories of Mechanics (Springer-Verlag, New York, 2004).
- Bonet et al. [2016] J. Bonet, A. J. Gil, and R. D. Wood, Nonlinear Solid Mechanics for Finite Element Analysis: Statics (Cambridge University Press, Cambridge, 2016).
- O'Reilly [1989] E. P. O'Reilly, Valence band engineering in strained-layer structures, Semicond. Sci. Technol. 4, 121 (1989).
- Frogley et al. [2000] M. D. Frogley, J. R. Downes, and D. J. Dunstan, Theory of the anomalously low band-gap pressure coefficients in strained-layer semiconductor alloys, Phys. Rev. B 62, 13612 (2000).
- Banerjee and Williams [2013] D. Banerjee and J. Williams, Perspectives on titanium science and technology, Acta Mater. 61, 844 (2013).
- Saito et al. [2003] T. Saito, T. Furuta, J.-H. Hwang, S. Kuramoto, K. Nishino, N. Suzuki, R. Chen, A. Yamada, K. Ito, Y. Seno, T. Nonaka, H. Ikehata, N. Nagasako, C. Iwamoto, Y. Ikuhara, and T. Sakuma, Multifunctional alloys obtained via a dislocation-free plastic deformation mechanism, Science 300, 464 (2003).
- Zhang et al. [2009] S. Zhang, S. Li, M. Jia, Y. Hao, and R. Yang, Fatigue properties of a multifunctional titanium alloy exhibiting nonlinear elastic deformation behavior, Scr. Mater. 60, 733 (2009).
- Cooper et al. [2013] R. C. Cooper, C. Lee, C. A. Marianetti, X. Wei, J. Hone, and J. W. Kysar, Nonlinear elastic behavior of two-dimensional molybdenum disulfide, Phys. Rev. B 87, 035423 (2013).
- Lee et al. [2008] C. Lee, X. Wei, J. W. Kysar, and J. Hone, Measurement of the elastic properties and intrinsic strength of monolayer graphene, Science 321, 385 (2008).
- Cadelano et al. [2009] E. Cadelano, P. L. Palla, S. Giordano, and L. Colombo, Nonlinear elasticity of monolayer graphene, Phys. Rev. Lett. 102, 235502 (2009).
- Sadasivuni et al. [2014] K. K. Sadasivuni, D. Ponnamma, S. Thomas, and Y. Grohens, Evolution from graphite to graphene elastomer composites, Prog. Polym. Sci. 39, 749 (2014), topical issue on Electroactive Polymers.
- Yakobson et al. [1996] B. I. Yakobson, C. J. Brabec, and J. Bernholc, Nanomechanics of carbon tubes: Instabilities beyond linear response, Phys. Rev. Lett. 76, 2511 (1996).
- Yu et al. [2000] M.-F. Yu, O. Lourie, M. J. Dyer, K. Moloni, T. F. Kelly, and R. S. Ruoff, Strength and breaking mechanism of multiwalled carbon nanotubes under tensile load, Science 287, 637 (2000).
- Łepkowski [2007] S. P. Łepkowski, Nonlinear elasticity effect in group III-nitride quantum heterostructures: Ab initio calculations, Phys. Rev. B 75, 195303 (2007).
- Wei et al. [2009] X. Wei, B. Fragneaud, C. A. Marianetti, and J. W. Kysar, Nonlinear elastic behavior of graphene: Ab initio calculations to continuum description, Phys. Rev. B 80, 205407 (2009).
- Birch [1947] F. Birch, Finite elastic strain of cubic crystals, Phys. Rev. 71, 809 (1947).
- Tanner et al. [2019] D. S. P. Tanner, M. A. Caro, S. Schulz, and E. P. O’Reilly, Hybrid functional study of nonlinear elasticity and internal strain in zinc-blende iii-v materials, Phys. Rev. Mater. 3, 013604 (2019).
- Jain et al. [2000] S. C. Jain, M. Willander, J. Narayan, and R. V. Overstraeten, III–nitrides: Growth, characterization, and properties, J. Appl. Phys. 87, 965 (2000).
- Huang et al. [2006] C.-F. Huang, T.-Y. Tang, J.-J. Huang, W.-Y. Shiao, C. C. Yang, C.-W. Hsu, and L. C. Chen, Prestrained effect on the emission properties of InGa/GaN quantum-well structures, Appl. Phys. Lett. 89, 051913 (2006).
- Ni et al. [2008] Z. H. Ni, T. Yu, Y. H. Lu, Y. Y. Wang, Y. P. Feng, and Z. X. Shen, Uniaxial strain on graphene: Raman spectroscopy study and band-gap opening, ACS Nano 2, 2301 (2008).
- [22] M. Oliva-Leyva and C. Wang, Low-energy theory for strained graphene: an approach up to second-order in the strain tensor, J. Phys.: Condens. Matter 29, 165301.
- Gong et al. [2021] D. Gong, H. Wang, E. Obbard, S. Li, R. Yang, and Y. Hao, Tuning thermal expansion by a continuing atomic rearrangement mechanism in a multifunctional titanium alloy, J. Mater. Sci. Technol. 80, 234 (2021).
- Landau and Lifshitz [1986] L. D. Landau and E. M. Lifshitz, Theory of Elasticity (Elsevier, Oxford, 1986).
- Sadd [2009] M. H. Sadd, Elasticity: Theory, Applications, and Numerics (Academic Press, Burlington, 2009).
- Hamermesh [1962] M. Hamermesh, Group Theory and Its Application to Physical Problems (Addison-Wesley, Reading, 1962).
- Rossmann [2006] W. Rossmann, Lie Groups: An Introduction through Linear Groups, Vol. 5 (Oxford University Press, Oxford, 2006).
- Hall [2015] B. Hall, Lie Groups, Lie Algebras, and Representations: An Elementary Introduction, Vol. 222 (Springer, New York, 2015).
- Ogden [2001] R. W. Ogden, Elements of the theory of finite elasticity, in Nonlinear Elasticity: Theory and Applications, edited by Y. B. Fu and R. W. Ogden (Cambridge University Press, Cambridge, 2001) pp. 1–57.
- de Gennes [1980] P. G. de Gennes, Weak nematic gels, in Liquid Crystals of One- and Two-Dimensional Order (Springer, Berlin, 1980) pp. 231–237.
- Menzel et al. [2007] A. M. Menzel, H. Pleiner, and H. R. Brand, Nonlinear relative rotations in liquid crystalline elastomers, J. Chem. Phys. 126, 234901 (2007).
- Holzapfel et al. [2000] G. A. Holzapfel, T. C. Gasser, and R. W. Ogden, A new constitutive framework for arterial wall mechanics and a comparative study of material models, J. Elast. 61, 1 (2000).
- Chen and Haughton [2003] Y.-C. Chen and D. M. Haughton, Stability and bifurcation of inflation of elastic cylinders, Proc. Royal Soc. A: Math. Phys. Eng. Sci. 459, 137 (2003).
- Goldstein et al. [2001] H. Goldstein, C. Poole, and J. Safko, Classical Mechanics, 3rd ed. (Addison-Wesley, 2001).
- Gell-Mann [1962] M. Gell-Mann, Symmetries of baryons and mesons, Phys. Rev. 125, 1067 (1962).
- Rosen [1966] G. Rosen, Unitary irreducible representations of ), J. Math. Phys. 7, 1284 (1966).
- Lee [1969] E. H. Lee, Elastic-plastic deformation at finite strains, J. Appl. Mech. 36, 1 (1969).
- Kleinert [1989] H. Kleinert, Gauge Fields in Condensed Matter, Vol. 2 (World Scientific, Singapore, 1989) Chap. 2.
- Bigoni [2012] D. Bigoni, Nonlinear Solid Mechanics: Bifurcation Theory and Material Instability (Cambridge University Press, Cambridge, 2012).
- Toner and Nelson [1981] J. Toner and D. R. Nelson, Smectic, cholesteric, and Rayleigh-Benard order in two dimensions, Phys. Rev. B 23, 316 (1981).
- Nelson and Toner [1981] D. R. Nelson and J. Toner, Bond-orientational order, dislocation loops, and melting of solids and smectic- liquid crystals, Phys. Rev. B 24, 363 (1981).
- Lubensky et al. [2002] T. C. Lubensky, R. Mukhopadhyay, L. Radzihovsky, and X. Xing, Symmetries and elasticity of nematic gels, Phys. Rev. E 66, 011702 (2002).
- Storm et al. [2005] C. Storm, J. J. Pastore, F. C. MacKintosh, T. C. Lubensky, and P. A. Janmey, Nonlinear elasticity in biological gels, Nature 435, 191 (2005).
- Mihai and Goriely [2017] L. A. Mihai and A. Goriely, How to characterize a nonlinear elastic material? A review on nonlinear constitutive parameters in isotropic finite elasticity, Proc. R. Soc. A: Math. Phys. Eng. Sci. 473, 20170607 (2017).
- Menzel and Löwen [2020] A. M. Menzel and H. Löwen, Modeling and theoretical description of magnetic hybrid materials—bridging from meso- to macro-scales, Phys. Sci. Rev. , 20190088 (2020).
- Xing et al. [2008] X. Xing, S. Pfahl, S. Mukhopadhyay, P. M. Goldbart, and A. Zippelius, Nematic elastomers: From a microscopic model to macroscopic elasticity theory, Phys. Rev. E 77, 051802 (2008).
- Liverpool et al. [2009] T. B. Liverpool, M. C. Marchetti, J.-F. Joanny, and J. Prost, Mechanical response of active gels, Europhys. Lett. 85, 18007 (2009).
- Månsson et al. [2019] A. Månsson, M. Persson, N. Shalabi, and D. E. Rassier, Nonlinear actomyosin elasticity in muscle?, Biophys. J. 116, 330 (2019).
- Frenkel and Smit [2002] D. Frenkel and B. Smit, Understanding Molecular Simulation: from Algorithms to Applications, 2nd ed. (Academic Press, San Diego, 2002).
- Parrinello and Rahman [1982] M. Parrinello and A. Rahman, Strain fluctuations and elastic constants, J. Chem. Phys. 76, 2662 (1982).