A contact McKay correspondence for links of simple singularities
Abstract
We compute the cylindrical contact homology of the links of the simple singularities. These manifolds are contactomorphic to for finite subgroups . We perturb the degenerate contact form on with a Morse function, which is invariant under the corresponding action on , to achieve nondegeneracy up to an action threshold. The cylindrical contact homology is recovered by taking a direct limit of the action filtered homology groups. The ranks of this homology are given in terms of , demonstrating a Floer theoretic McKay correspondence.
1 Introduction
A simple singularity is modeled by the isolated singular point of the variety , for a finite nontrivial subgroup . The action of on admits an invariant subring, generated by three monomials, for , that satisfy a minimal polynomial relation,
for some nonzero . These weighted polynomials provide an alternative perspective of the simple singularities as hypersurface singularities in . Specifically, the map
defines an isomorphism of complex varieties, , and produces a hypersurface singularity given any finite nontrivial . The following table summarizing the relationship of to . The integer triple corresponds to the lengths of the 3 branches of the associated Dynkin diagram denoted by . In the case, is an arbitrary pair of positive integers satisfying .
| Group | Graph | branches | |
|---|---|---|---|
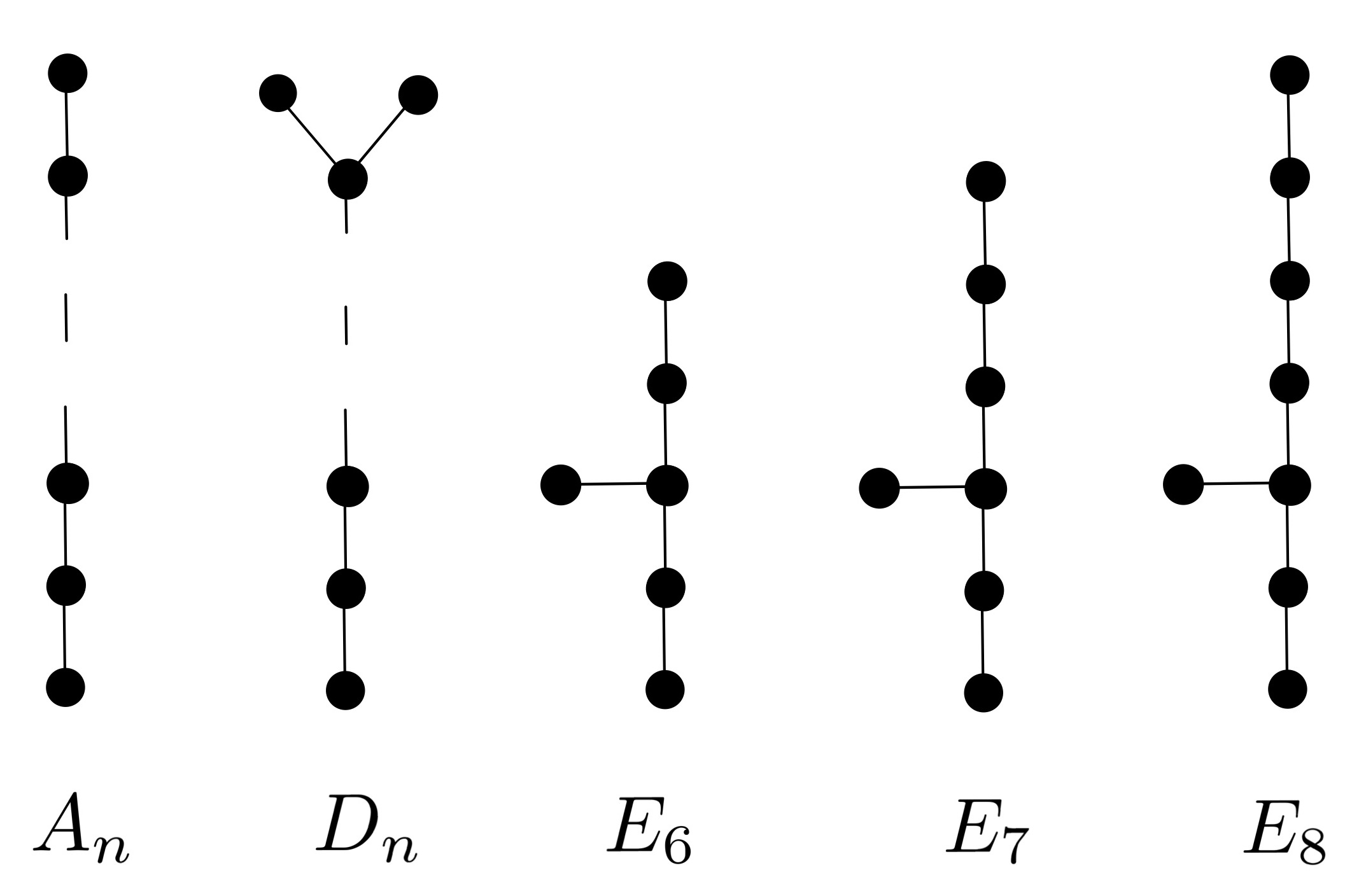
One can recover the conjugacy class of from by studying the Dynkin diagram associated to the minimal resolution of a simple singularity of , using the McKay correspondence [McK80] summarized below. The Dynkin diagram associated to (the minimal resolution of) is the finite graph whose vertex is labeled by the exceptional holomorphic sphere of self-intersection -2, and is adjacent to if and only if transversely intersects with . In this way, we associate to any simple singularity the graph . It is a classical fact that is isomorphic to one of the , , or the , , or graphs (see [Sl80, §6]), depicted in Figure 1.1.
The Dynkin diagrams also simultaneously classify the types of conjugacy classes of finite subgroups of . Any finite subgroup must be either cyclic, conjugate to , or is a binary polyhedral group, cf. [Za58, §1.6]. Associated to each type of finite subgroup is a finite graph, . The vertices of are in correspondence with the nontrivial irreducible representations of , of which there are , where denotes the set of conjugacy classes of a group . The McKay correspondence states that is isomorphic to one of the , , or the , , or graphs, as enumerated in Table 2. The adjacency matrix of the Dynkin diagram determines the tensor products with the canonical representation, cf. [St85]. We also note that the dimension of the cohomology of the minimal resolution is precisely the number of irreducible representations.
We adapt a method of computing the cylindrical contact homology of as a direct limit of action filtered homology groups, described by Nelson in [Ne20]. This process uses a (lift of a) Morse function, which is invariant under the corresponding symmetry group in , to perturb the standard degenerate contact form. In order to define the exact symplectic cobordism maps necessary to take direct limits, a detailed analysis of the homotopy classes of Reeb orbits is needed due to the presence of contractible and torsion Reeb orbits.
Our computation realizes a contact Floer theoretic McKay correspondence result, namely that the ranks of the cylindrical contact homology of the links111 Recall that the link of a hypersurface singularity in is the 3-dimensional contact manifold , with contact structure , where is the standard integrable complex structure on , and is small. There is a contactomorphism , where on is the descent of the standard contact structure on to the quotient by the -action. of simple singularities are given in terms of the number of conjugacy classes of the group . It additionally recovers the presentation of the manifold as a Seifert fiber space and, in this sense, provides a natural basis for the cylindrical contact homology in terms of the Reeb orbits realizing the different conjugacy classes of , cf. Remark 1.3.
We expect that our explicit description of the cylindrical chain complexes will enable computations of embedded contact homology and its associated spectral invariants after an appropriate adaption of arguments from [NW23, NW2]. Such results will be of interest in the context of gauge theory as well as have applications to the study of symplectic embeddings and fillings. Our computations realize McLean and Ritter’s work, which computes the positive -equivariant symplectic cohomology of the crepant resolution of in terms of the number of conjugacy classes of the finite , [MR, Theorem 1.10, Corollary 2.13], without needing to know the cohomology of the minimal resolution.
1.1 Definitions and overview of cylindrical contact homology
First we recall some basic definitions. Let be a closed contact three manifold with defining contact form . This contact form determines a smooth vector field, , called the Reeb vector field, which uniquely satisfies and . A Reeb orbit is a map , considered up to reparametrization, with . Let denote the set of Reeb orbits of . If and , then the -fold iterate of , denoted , is the precomposition of with . The orbit is embedded when is injective. If is the -fold iterate of an embedded Reeb orbit, then is the multiplicity of .
For a Reeb orbit as above, the time linearized Reeb flow defines a symplectic linear map
after making a choice of trivialization, which we also denote by . We say is nondegenerate if does not have 1 as an eigenvalue. The contact form is called nondegenerate if all are nondegenerate. A nondegenerate Reeb orbit is said to be elliptic if has its eigenvalues on the unit circle and hyperbolic if has real eigenvalues. (If both real eigenvalues are positive then is a positive hyperbolic orbit and if both real eigenvalues are negative then is a negative hyperbolic orbit.)
If is a homotopy class of trivializations of , then the Conley Zehnder index, is defined and related to the rotation of the Reeb flow along . The parity of the Conley-Zehnder index does not depend on the choice of trivialization and is even when is positive hyperbolic and odd when is elliptic. If is an embedded negative hyperbolic orbit then the parity of the Conley-Zehnder index is odd for all odd iterates and even for all even iterates, with respect to any homotopy class of trivializations. An orbit is said to be bad if it is an even iterate of a negative hyperbolic orbit, otherwise, is said to be good. Let denote the set of good Reeb orbits.
If and if for all contractible with any extendable over a disc, we say the nondegenerate contact form is dynamically convex. The symplectic vector bundle admits a global trivialization if , which is unique up to homotopy if . In this case, the integral grading of the generator is defined to be for any induced by a global trivialization of .
Definition 1.1.
We say that an almost complex structure on is -compatible if
-
•
;
-
•
for nonzero ;
-
•
is invariant under translation of the factor;
-
•
, where denotes the coordinate.
We denote the set of all -compatible by .
Fix such a -compatible . If and are Reeb orbits, we consider -holomorphic cylinders interpolating between them, which are smooth maps such that the nonlinear Cauchy-Riemann equation holds
, and is a parametrization of . Here and are the respective projections from to and . We say that is positively asymptotic to and negatively asymptotic to . We declare two maps to be equivalent if they differ by translation and rotation of the domain , and denote the set of equivalence classes by . There is an additional action by translation of the factor on the target .
We define the Fredholm index of a cylinder by
after fixing a trivialization of over and . The relative first Chern class vanishes when extends to a trivialization of . For , denotes those cylinders with . The significance of the Fredholm index is that if is generic and is somewhere injective, then is naturally a manifold near of dimension .
For a nondegenerate contact form , and under favorable transversality conditions, we define the cylindrical contact homology chain complex over as follows. (The original definition is due to Eliashberg-Givental-Hofer [EGH00] and we are using notation from [HN22], but suppressing some decorations as we only consider one cylindrical flavor of contact homology in this paper.) As a module, is noncanonically isomorphic to the vector space over generateed by good Reeb orbits; an isomorphism is fixed after a choice of coherent orientations, which is used to define a -module that is noncanonically isomorphic to , cf. [HN22, A.3]. We then define
The choice of a generator of for each good Reeb orbit specifies an isomorphism
This chain complex admits a canonical -grading determined by the mod 2 Conley-Zehnder index, which can be upgraded to a relative or absolute grading in certain circumstances. In the setting of this paper, we have an absolute grading given by
where is any homotopy class of the global unitary trivialization constructed in (2.2) and Remark 2.12.
To define the differential, we first define the following operator assuming that all moduli spaces with Fredholm index are cut out transversely:
given by
Here is an element of after generators of and have been chosen, cf. [HN22, Def. A.26], and is the covering multiplicity of , which is 1 if and only if is somewhere injective.
Next we define an operator
by
Under suitable transversality assumptions for , then counting their ends yields
| (1.1) |
This was proven in the dynamically convex case in [HN16] and recovered in arbitrary odd dimensions in the absence of contractible Reeb orbits in [HN22]. As a result of (1.1), we obtain that
is a differential on . The differential preserves the free homotopy class of Reeb orbits because they count cylinders which project to homotopies in between Reeb orbits.
Under additional hypotheses, this homology is independent of contact form defining and generic (for example, if admits no contractible Reeb orbits, [HN22, Corollary 1.10]), and is denoted . This is the cylindrical contact homology of . Upcoming work of Hutchings and Nelson will show that is independent of dynamically convex and generic .
1.2 Main result and connections to other work
The link of the singularity is shown to be contactomorphic to the lens space in [AHNS17, Theorem 1.8]. More generally, the links of simple singularities are shown to be contactomorphic to quotients in [Ne1, Theorem 5.3]. Theorem 1.2 computes the cylindrical contact homology of as a direct limit of filtered homology groups.
Theorem 1.2.
Let be a finite nontrivial group, and let be the number of conjugacy classes of . The cylindrical contact homology of is
The directed system of filtered cylindrical contact homology groups is described in Section 1.3. Upcoming work of Hutchings and Nelson will show that this direct limit is an invariant of , in the sense that it is isomorphic to where is any dynamically convex contact form on with kernel , and is generic.
The brackets in Theorem 1.2 describe the degree of the grading.222For example, is a ten dimensional space with nine dimensions in degree 5, and one dimension in degree 3. By the classification of finite subgroups of , the following enumerates the possible values of :
-
(i)
If is cyclic of order , then .
-
(ii)
If is binary dihedral, for some , then .
-
(iii)
If is binary polyhedral, , or , then , or , respectively.
Remark 1.3.
The cylindrical contact homology in Theorem 1.2 recovers the presentation of the manifold as a Seifert fiber space, whose -action agrees with the Reeb flow of a contact form defining . Viewing the manifold as an -bundle over an orbifold surface333Namely where and , cf. Section 1.3. homeomorphic to , the copies of appearing in Theorem 1.2 may be understood as the orbifold Morse homology of this base. Each orbifold point with isotropy order corresponds to an exceptional fiber, , in , which may be realized as an embedded Reeb orbit. The generators of the term are the iterates for so that the dimension of this summand can be regarded as a kind of total isotropy of the base.
Remark 1.4.
Theorem 1.2 can alternatively be expressed as
In this form, we realize the expected isomorphism [BO17] between cylindrical contact homology and the positive -equivariant symplectic cohomology with coefficients in of the crepant resolutions of the singularities , as computed by McLean and Ritter. Their work shows that these groups with -coefficients are free -modules of rank equal to , where and has degree 2 [MR, Corollary 2.13].
Remark 1.5.
Recent work of Haney and Mark computes the cylindrical contact homology in [HM22] of a family of hyperbolic Brieskorn manifolds , for , , relatively prime positive integers satisfying , using methods from [Ne20]. Their work uses a family of hypertight contact forms, whose Reeb orbits are non-contractible. These manifolds are also Seifert fiber spaces, whose cylindrical contact homology features summands arising from copies of the homology of the orbit space, as well as summands from the total isotropy of the orbifold.
1.3 Structure of proof of main theorem
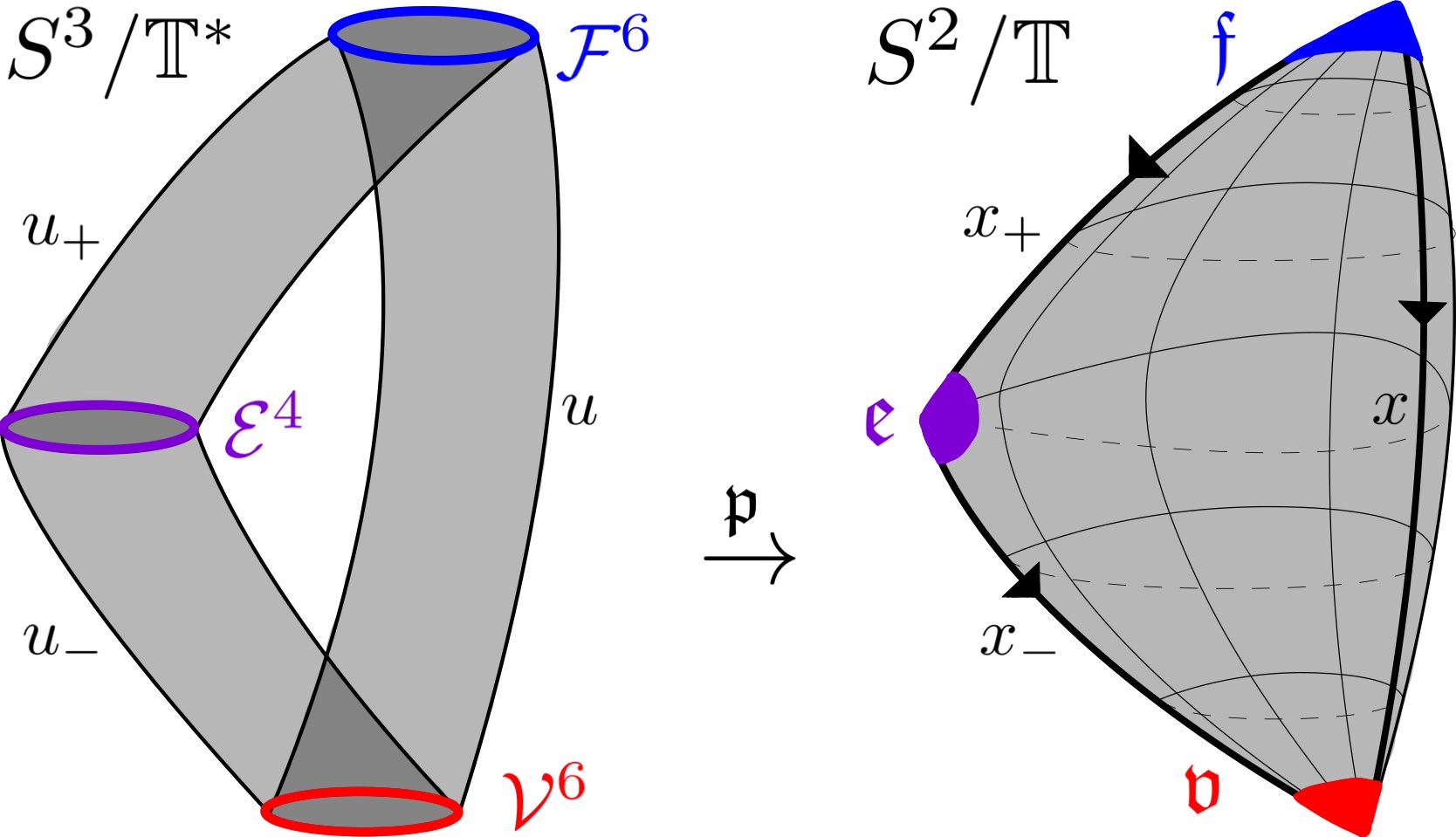
We now outline the proof of Theorem 1.2. Section 2 explains the process of perturbing a degenerate contact form on using an orbifold Morse function. Given a finite, nontrivial subgroup , denotes the image of under the double cover of Lie groups . By Lemma 2.1, the quotient by the -action on the Seifert fiber space may be identified with a map . This fits into a commuting square of topological spaces (2.11) involving the Hopf fibration .
An -invariant Morse-Smale function on , constructed in Section 2.3, descends to an orbifold Morse function, , on . Here, is the Fubini-Study form on , and is the standard integrable complex structure. By Lemma 2.4, the Reeb vector field of the perturbed contact form on
is the descent of the vector field
to . Here, is a horizontal lift to of the Hamiltonian vector field of on , computed with respect to , and we use the convention that . Thus, the term vanishes along exceptional fibers of projecting to orbifold critical points of , implying that these parametrized circles and their iterates are Reeb orbits of . Lemma 2.15 computes the Conley-Zehnder index in terms of and the Morse index of at with respect to a global unitary trivialization.
Next we outline our procedure of taking direct limits in Section 4 of action filtered cylindrical contact homology in Section 3. Given a contact manifold , the action of a Reeb orbit is the positive quantity
For , we let denote the set of orbits with . A contact form is -nondegenerate when all are nondegenerate. If and for all contractible , we say that the -nondegenerate contact form is -dynamically convex. By Lemma 2.15, given , all are nondegenerate and project to critical points of under , when is sufficiently small.
This lemma allows for the computation in Section 3 of the action filtered cylindrical contact homology. After fixing , restricts to a differential, , on the subcomplex generated by , denoted , whose homology is denoted . This is because the differential decreases action: if then is empty because by Stokes’ theorem, action decreases along holomorphic cylinders in a symplectization.
In Section 3, we use Lemma 2.15 to produce a sequence , where in , is an -dynamically convex contact form for , and is generic. By Lemmas 3.1 and 3.3, every orbit is of even degree, and so , providing
| (1.2) |
Finally, we prove Theorem 4.4 in Section 4, which states that a completed symplectic cobordism from to , for , induces a homomorphism,
which takes the form of the standard inclusion when making the identification (1.2). The proof of Theorem 4.4 comes in two steps. First, the moduli spaces are finite by Proposition 4.7 and Corollary 4.8, implying that the map is well defined. Second, the identification of with a standard inclusion is made precise in the following manner. Given , there is a unique which
-
(i)
projects to the same critical point of as under ,
-
(ii)
satisfies .
When (i) and (ii) hold, we write . We argue in Section 4 that takes the form , when .
Theorem 4.4 now implies that the system of filtered contact homology groups is identified with a sequence of inclusions of vector spaces, providing isomorphic direct limits:
1.4 Connections to orbifold Morse homology
Using the construction of the orbifold Morse-Smale-Witten complex as in Cho and Hong in [CH14] we can draw the following parallels between orbifold Morse homology and cylindrical contact homology. Given an orbifold Morse function on an orbifold , the chain group is generated by the orientable critical points of . The differential, , is given as a weighted count of the negative gradient flow lines between orientable critical points in . There are two notable similarities between the chain complexes and , exemplified by our computations.
(1) Bad Reeb orbits are analogous to non-orientable critical points.
Bad Reeb orbits are excluded as generators of for the same reasons that non-orientable critical points are excluded as generators of . A critical point of on an orbifold is non-orientable if the action of its isotropy group on a choice of unstable manifold is not orientation preserving. Analogously, a Reeb orbit is bad if the action of its cyclic deck group on an asymptotic operator is not orientation preserving.
Our Seifert projections geometrically realize this analogy: if is a bad Reeb orbit associated to in that projects to orbifold critical point of , then is non-orientable. Conversely, if is a non-orientable critical point of , then there is a bad Reeb orbit associated to in projecting to . This interplay can be realized through the pairs for the binary dihedral group in Sections 3.2 and for the binary polyhedral group in Section 3.3.
(2) The differentials are structurally identical.
Take good Reeb orbits and with , and take orientable critical points and of orbifold Morse with . Now compare
Here, is the space of negative gradient paths from to , and is the local isotropy group at any point on the path , whose order divides . Both quantities come from choices of orientations in each setting and are well-defined because and are good, and because and are orientable.
The similarities of both boundary operators as weighted counts of moduli spaces reflect the parallels between the breaking and gluing of the two theories: a single broken gradient path or building may serve as the limit of multiple ends of a 1-dimensional moduli space in either setting. For a thorough treatment of why these signed counts generally produce a differential that squares to zero, see [CH14, Theroem 5.1] (in the orbifold case) and [HN16, §4.3] (in the contact case).
Acknowledgements
Leo Digiosia thanks his advisor, Jo Nelson, for her exceptional guidance and discussions. Leo Digiosia was supported by NSF grants DMS-1745670, DMS-1840723, and DMS-2104411. Jo Nelson is supported by NSF grants DMS-2104411 and CAREER DMS-2142694. We thank the referee for their thoughtful reading and helpful comments on this paper, especially with respect to the cobordism maps in Section 4. (Section 4 also benefited from a comment from Chris Wendl and his book [We20].)
2 Geometric setup and dynamics
In this section we first review the process of perturbing degenerate contact forms on and using a Morse function to achieve nondegeneracy up to an action threshold, following [Ne20, §1.5]. We then identify the associated Reeb orbits of and compute their Conley Zehnder indices in Lemma 2.15. In Section 2.3 we construct the -invariant Morse functions we use to perturb the contact forms on . In Sections 2.4 and 2.5 we elucidate how the Reeb dynamics realize the Morse orbifold data associated to .
2.1 Spherical geometry and associated Reeb dynamics
The diffeomorphism between and provides with the structure of a Lie group:
| (2.1) |
and we see that is the identity element. The round contact form on , denoted , is defined as the restriction of the 1-form to , where
The -action on preserves and , and so the -action on preserves .
There is a natural Lie algebra isomorphism between the tangent space of the identity element of a Lie group and its collection of left-invariant vector fields. The contact plane at the identity element is spanned by the tangent vectors and , where we are viewing
Let and be the left-invariant vector fields corresponding to and , respectively. Because acts on itself by contactomorphisms, and are sections of and provide a global unitary trivialization of , denoted :
| (2.2) |
Here, is the standard integrable complex structure on . Note that everywhere. Given a Reeb orbit of any contact form on , let the symbol denote the Conley Zehnder index of with respect to this . If , write and . Then, with respect to the ordered basis of , we have the following expressions
| (2.3) |
Consider the double cover of Lie groups, . The kernel of has order 2 and is generated by , the only element of of order 2.
| (2.4) |
A diffeomorphism is given in homogeneous coordinates () by
| (2.5) |
We have an -action on , pulled back from the -action on by (2.5). Lemma 2.1 illustrates how the action of on is related to the action of on via
Lemma 2.1.
For a point in , let denote the corresponding point under the quotient of the -action on . Then for all , and all matrices , we have
Proof.
First, note that the result holds for the case . This is because corresponds to under (2.5), and so for any , is the first column of the matrix appearing in (2.4). That is,
| (2.6) |
(where is the unique element corresponding to , using (2.1)). By (2.5), the point (2.6) equals , and so the result holds when .
For the general case, note that any equals for some , and use the fact that is a group homomorphism. ∎
The Reeb flow of is given by the (Hopf) action, . Thus, all have period , with linearized return maps equal to , and are degenerate.
Notation 2.2.
Following the general recipe of perturbing the degenerate contact form on a prequantization bundle, outlined in [Ne20, §1.5], we establish the following notation:
-
•
is the Hopf fibration.
-
•
is a Morse-Smale function on and is its set of critical points,
-
•
For ,
-
,
-
,
-
.
-
-
•
is the horizontal lift of using the fiberwise linear symplectomorphism , where denotes the Hamiltonian vector field of on with respect to .
Remark 2.3.
Our convention is that for a smooth, real valued function on symplectic manifold , the Hamiltonian vector field uniquely satisfies .
For small , ker . We refer to as the perturbed contact form on . Although and define the same contact structure, their Reeb dynamics differ.
Lemma 2.4.
The following relationship between vector fields on holds:
Proof.
We now explore how the relationship between vector fields from Lemma 2.4 provides a relationship between Reeb and Hamiltonian flows.
Notation 2.5.
(Reeb and Hamiltonian flows). For any ,
-
•
denotes the time flow of the unperturbed Reeb vector field ,
-
•
denotes the time flow of the perturbed Reeb vector field ,
-
•
denotes the time flow of the vector field
Lemma 2.6.
For all values, we have as smooth maps .
Proof.
Pick and let denote the unique integral curve for which passes through at time , i.e., . By Lemma 2.4, carries the derivative of precisely to the vector . Thus, is the unique integral curve, , of passing through at time , i.e., . Combining these facts provides
∎
Lemma 2.7 describes the orbits projecting to critical points of under .
Lemma 2.7.
Let and take . Then the map
descends to a closed, embedded Reeb orbit of , passing through point in , whose image under is , where denotes the action on .
Proof.
The map , is a closed, embedded integral curve for the degenerate Reeb field , and so by the chain rule we have that . Note that and, because is a lift of , we have . By the description of in Lemma 2.4, we have . ∎
Next we set notation to be used in describing the local models for the linearized Reeb flow along the orbits from Lemma 2.7. For , denotes the rotation matrix:
Note that . For , pick coordinates , so that . Then we let denote the Hessian of in these coordinates at .
Notation 2.8.
The term stereographic coordinates at describes a smooth with , which has a factorization , where is the map
taking to , and is given by the action of some element of taking to . If and are both stereographic coordinates at , then they differ by a precomposition with some in . Note that ([MS15, Ex. 4.3.4]).
Lemma 2.9 describes the linearized Reeb flow of the unperturbed with respect to .
Lemma 2.9.
For any , the linearization is represented by , with respect to ordered bases of and of .
Proof.
Proposition 2.10.
Fix a critical point of in and stereographic coordinates at , and suppose projects to under . Let denote with respect to the trivialization . Then is a conjugate of the matrix
by some element of , which is independent of .
Proof.
Let . We linearize the identity from Lemma 2.6, restrict to , and rearrange to recover the equality , where
Let , then and provide an oriented basis of each of the three vector spaces appearing in the above composition of linear maps. Let , , and denote the matrix representations of , , and with respect to these ordered bases. We have . Note that . We compute and :
To compute , recall that denotes the time flow of the unperturbed Reeb field (alternatively, the Hopf action). Linearize the equality , then use from Lemma 2.7 and Lemma 2.9 to find that
| (2.9) |
To compute , note that is the Hamiltonian flow of the function with respect to . It is advantageous to study this flow using our stereographic coordinates: recall that defines a symplectomorphism , where is antipodal to in (see Notation 2.8). Because symplectomorphisms preserve Hamiltonian data, we have that is given near the origin as the time flow of the Hamiltonian vector field for with respect to . That is,
Recall that if is a smooth vector field on , vanishing at , then the linearization of its time flow evaluated at the origin is represented by the matrix , with respect to the standard ordered basis of , where
Here, the partial derivatives of and are implicitly assumed to be evaluated at the origin. In this spirit, set and , and we compute
This implies that , where is a change of basis matrix relating and the pushforward of by in . Because is holomorphic, must equal for some and some . This provides that
| (2.10) |
Corollary 2.11.
Fix . Then there exists some such that for , all Reeb orbits are nondegenerate, take the form , a -fold cover of an embedded Reeb orbit as in in Lemma 2.7, and for .
Proof.
That is nondegenerate and projects to a critical point of is proven in [Ne20, Lemma 4.11]. To compute , we apply the naturality, loop, and signature properties of the Conley Zehnder index (see [Sal99, §2.4]) to our path . By Proposition 2.10, this family of matrices has a factorization, up to -conjugation, , where is the loop of symplectic matrices , , and is the path of matrix exponentials , where denotes a choice of stereographic coordinates at . In total,
Here, denotes the Maslov index of a loop of symplectic matrices (see [MS15, §2]). ∎
2.2 Geometry of and associated Reeb dynamics
The previous process of perturbing a degenerate contact form on prequantization bundles, is often used to compute Floer theories, for example, their cylindrical contact homology [Ne20] and embedded contact homology [NW23]. Although the quotients are not prequantization bundles, they do admit an -action (with fixed points), and are examples of Seifert fiber spaces which are realizable as principal -orbibundles over integral symplectic orbifolds.
Let be a finite nontrivial group. Since acts on without fixed points, inherits smooth structure. The quotient is a universal cover, thus is completely torsion, and . Because the -action preserves , we have a descent of to a contact form on , denoted , with . As the actions of and on commute, we obtain an -action on , which realizes the Reeb flow of . Hence, is degenerate.
Let denote , the image of under . The -action on has fixed points, and so the quotient inherits orbifold structure. Lemma 2.1 provides a unique map , making the following diagram commute
| (2.11) |
where is a finite cover, is an orbifold cover, is a projection of a prequantization bundle, and is identified with the Seifert fibration.
Remark 2.12.
(Global trivialization of ). Recall the -invariant vector fields spanning on (2.2). Because these are -invariant, they descend to smooth sections of , providing a global unitary trivialization, , of , hence . Given a Reeb orbit of some contact form on , we denote by the Conley Zehnder index of with respect to this global trivialization.
We assume that the Morse function is -invariant and descends to an orbifold Morse function, , in the language of [CH14]. The -invariance of provides that the smooth is -invariant, and descends to a smooth function, . We define, analogously to Notation 2.2,
For sufficiently small , is a contact form on with kernel . The condition implies that is an integral curve of if and only if is an integral curve of .
Remark 2.13.
(Local models on and agree). Suppose is a Reeb trajectory of , so that is a Reeb trajectory of . For , let denote the time linearized Reeb flow of along with respect to , and let denote that of along with respect to . Then , because the local contactomorphism preserves the trivializations in addition to the contact forms.
Let to be the orbit of , and denote the isotropy subgroup of by
Recall that for any . A point is a fixed point if . The set of fixed points of is . The point is an orbifold point if for some . We now additionally assume that satisfies ; this will be the case in Section 3. The Reeb orbit from Lemma 2.7 projects to under , and thus projects to the orbifold point under . Lemma 2.14 computes the Reeb orbit multiplicity .
Lemma 2.14.
Let be the embedded Reeb orbit in from Lemma 2.7. Then the multiplicity of is if is even, and is if is odd.
Proof.
Recall that is even if and only if , and that is odd if and only if (the only element of of order 2 is , the generator of ). By the classification of finite subgroups of , if is odd, then is cyclic.
Let , let so that and , where when is even and when odd. Label the points of by . Now is a disjoint union of Hopf fibers, , where . Let denote the embedded circle . By commutativity of (2.11), we have that . We have the following commutative diagram of circles and points:
We must have that is a -fold cover from the disjoint union of Hopf fibers to one embedded circle. The restriction of to any one of these circles provides a smooth covering map, ; let denote the degree of this cover. Because acts transitively on these circles, all of the degrees are equal to some . Thus, which implies that is the covering multiplicity of . ∎
We conclude this section with an analogue of Corollary 2.11 for the Reeb orbits of .
Lemma 2.15.
Fix . Then there exists some such that, for , all Reeb orbits are nondegenerate, project to an orbifold critical point of under , and whenever is contractible with a lift to some orbit in as in Lemma 2.7, where .
Proof.
Let and take the corresponding as appearing in Corollary 2.11, applied to . Now, for , elements of are nondegenerate and project to critical points of . Let and let denote the order of in . Now we see that is contractible and lifts to an orbit , which must be nondegenerate and must project to some critical point of under .
If the orbit is degenerate, then is degenerate and, by the discussion in Remark 2.13, would be degenerate. Commutativity of (2.11) implies that projects to the orbifold critical point of under . Finally, if then again by Remark 2.13, the local model of the Reeb flow along matches that of , , and thus . The latter index is computed in Corollary 2.11.
∎
2.3 Construction of -invariant Morse-Smale functions
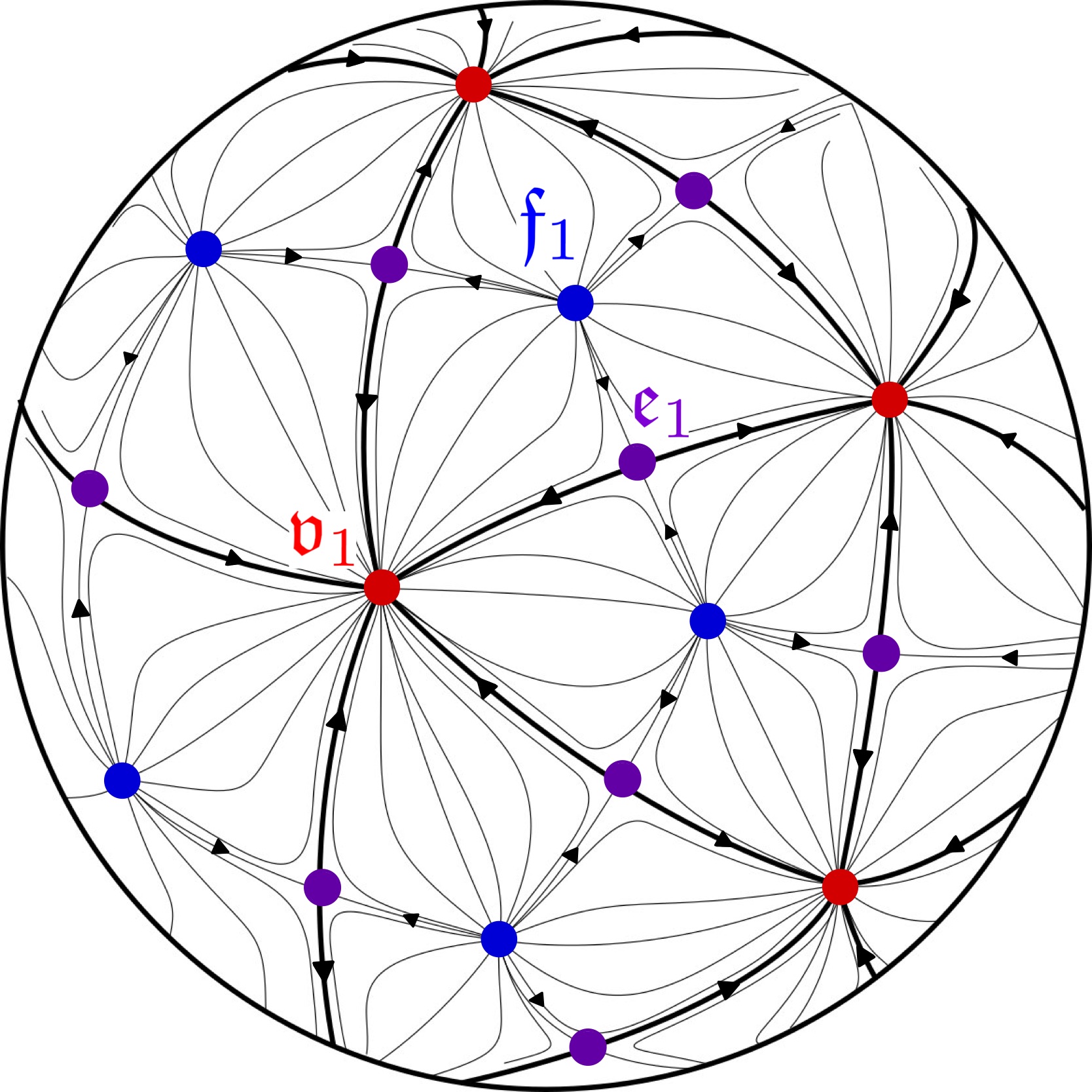
We now produce the -invariant, Morse-Smale functions on for the dihedral and polyhedral subgroups of . Table 3 describes three finite subsets, , , and , of which depend on . We construct an -invariant, Morse-Smale function on , whose set of critical points of index is , so that . Additionally, , the fixed point set of the -action on . This constructed is perfect in the sense that it features the minimal number of required critical points, because must always hold. In the case that is a polyhedral group, is the set of vertex points, is the set of edge midpoints, and is the set of face barycenters.
We illustrate the constructions of our perfect -invariant, Morse-Smale functions on in Figures 2.2, 2.2, 2.4, and 2.4, wherein the blue, violet, and red critical points are of Morse index 2, 1, and 0 respectively. Further details are also given in the following proof of Lemma 2.16
Lemma 2.16.
Let be either or . Then there exists an -invariant, Morse function on , with , such that if . Furthermore, there are stereographic coordinates at in which takes the form
-
(i)
, if
-
(ii)
, if
-
(iii)
, if
Proof.
We first produce an auxiliary Morse function , which might not be -invariant, then is taken to be the -average of . Fix ; for , let be the open geodesic disc centered at with radius with respect to the metric . Define on to be the pullback of , , or , for , , or respectively, by stereographic coordinates at . Set . For small, is a disjoint union and is Morse. We can arrange for our selection of stereographic coordinates to satisfy
where denotes . This ensures that the “saddles are rotated in the same -direction”. Notice that automatically holds for , for any choice of coordinates, because of the rotational symmetry of the quadratics and . Note that:
-
(a)
The -neighborhood of in , is an -invariant set, and for all , the -action restricts to an action on , where denotes the stabilizer subgroup.
-
(b)
For all , is -invariant.
-
(c)
The function is an -invariant Morse function, with .
The -invariance and -invariance in (a) hold, because acts on by -isometries (rotations about axes through ), and because is an -invariant set. The -invariance of (b) holds because, in stereographic coordinates, the -action pulled back to is always generated by some linear rotation about the origin, . Both and are invariant with respect to any , whereas is invariant with respect to the action generated by , which is precisely the action by when , so (b) holds. Finally, the -invariance in (c) holds directly by the invariance from (b), and by . Now, extend the domain of from to all of so that is smooth and Morse, with . Figures 2.2 and 2.2 depict possible extensions in the and cases, for example.
For , let denote the group action, . Define
where is the group order of . This -invariant is smooth and agrees with on . If no critical points are created in the averaging process of , then we have that , implying that is Morse, and we are done.
We say that the extension to from is roughly -invariant, if for any and , the angle between the nonzero gradient vectors
in is less than . If if roughly -invariant, then for , is an average of a collection of nonzero vectors in the same convex half space of and must be nonzero, implying . That is, if is roughly -invariant, then , as desired. The extensions in Figures 2.2, 2.2, 2.4, and 2.4 are all roughly -invariant by inspection, and the proof is complete. ∎
Lemma 2.17.
If is a Morse function on a 2-dimensional manifold such that for all with Morse index 1, then is Smale, given any metric on .
Proof.
Given metric on , fails to be Smale with respect to if and only if there are two distinct critical points of of Morse index 1 that are connected by a gradient flow line of . Because all such critical points have the same value, no such flow line exists. ∎
2.4 Cylinders over orbifold Morse trajectories
In Section 3 we will compute the action filtered cylindrical contact homology groups using the preceding set up. In particular we will show that the grading of any generator of the filtered chain complex is even444Recall that the degree of a generator is given by ., implying that the action filtered differential vanishes.
It is interesting to note however that not all moduli spaces of holomorphic cylinders are empty. In this section, we elucidate the correspondence between moduli spaces of certain -holomorphic cylinders and the moduli spaces of orbifold Morse trajectories in the base; the latter is often nonempty. We establish an orbifold version of the correspondence between cylinders and flow lines, in particular constructing a holomorphic cylinder from an orbifold Morse trajectory. We do not provide the full details as to why all holomorphic cylinders arise this way; this direction of the correspondence follows by way of the arguments as collected in [Ne20, §5] in the context of prequantization bundles, which may be invoked in the setting at hand as a result of [HN16, §2, 4], [Wen-SFT, §10], [SZ92]. While nothing presented in this section is necessary to the proof of Theorem 1.2, the correspondence may be of value for computing other contact homology theories.
As discussed in Section 1.4, the Seifert projection highlights many of the interplays between orbifold Morse theory and cylindrical contact homology. In particular, the projection geometrically relates holomorphic cylinders in to the orbifold Morse trajectories in . This necessitates a discussion about the complex structure on that we will use.
Remark 2.19.
(The canonical complex structure on )
Recall that the -action on preserves the standard complex structure on . Thus, descends to a complex structure on , which we will denote simply by in this section. Note that for any sufficiently small , and for any on , is -compatible, thus is -compatible as well.555This might not be one of the generic used to compute the filtered homology groups in the later Sections 3.1, 3.2, or 3.3. A generic choice of is necessary to ensure transversality of the cylinders in symplectic cobordisms, which are used to define the chain maps later in Section 4.
Remark 2.20.
(-holomorphic cylinders in over Morse flow lines in )
Fix critical points and of a Morse-Smale function on . Fix sufficiently small. By [Ne20, Propositions 5.4, 5.5], we have a bijective correspondence between and , for any , where and are the embedded Reeb orbits in projecting to and under . Given a Morse trajectory , the components of the corresponding cylinder are explicitly written down in [Ne20, §5] in terms of a parametrization of , the Hopf action on , the Morse function , and the horizontal lift of its gradient to . The resulting is -holomorphic.666We are abusing notation by conflating the parametrized cylindrical map with the equivalence class ; we will continue to abuse notation in this way. Furthermore, the Fredholm index of agrees with that of . The image of the composition
equals the image of in . We call the cylinder over .
The following procedure uses Remark 2.20 and Diagram 2.11 to establish a similar correspondence between moduli spaces of orbifold flow lines of and moduli spaces of -holomorphic cylinders in , where is taken to be the -descended complex structure on from Remark 2.19.
-
1.
Take , for orbifold Morse critical points of .
-
2.
Take a -lift, of , from to in , for some preimages and of and . We have .
-
3.
Let be the -holomorphic cylinder in over (see Remark 2.20). We now have .
-
4.
Let denote the composition
Because is the -descent of , we have that
is a holomorphic map. This implies that is -holomorphic;
(2.12)
Note that and are contractible Reeb orbits of projecting to and , respectively. Thus, if and are the embedded (potentially non-contractible) Reeb orbits of in over and , then we have that
where are the orders of and in . In particular, we can simplify equation (2.12):
This allows us to establish an orbifold version of the correspondence in [Ne20, §5]:
| (2.13) | ||||
Remark 2.21.
In order to conclude that all holomorphic cylinders arise as lifts of orbifold Morse trajectories, one must make a straightforward modification of the arguments as explained in [Ne20, §5], which adapts [Wen-SFT, Thm. 10.30, 10.32], which in turn is a modification of the original arguments by Salamon and Zehnder [SZ92]. The proof of [Ne20, Thm. 5.5] holds in the present setting as a result of the compactness results established in [HN16, Prop. 2.8] and automatic transversality results [HN16, Prop. 4.2(b)], [Wen10].
2.5 Orbifold and contact interplays: an example
Before giving the proof of the main theorem, we continue with our digression establishing connections between the contact data of and the orbifold Morse data of , as previously alluded to in Section 1.4. As before, for each , select an orientation of the embedded disc . The action of the stabilizer (equivalently, isotropy) subgroup of ,
on restricts to an action on by diffeomorphisms. We say that the critical point is orientable if this action is by orientation preserving diffeomorphisms. Let denote the set of orientable critical points.
Note that the -action on permutes , and the action restricts to a permutation of . Furthermore, the index of a critical point is preserved by the action. Let , , and denote the quotients , , and , respectively. As in the smooth case, we define the -orbifold Morse chain group, denoted , to be the free abelian group generated by . The differential will be defined by a signed and weighted count of negative gradient trajectories in . The homology of this chain complex is, as in the smooth case, isomorphic to the singular homology of ([CH14, Theorem 2.9]).
First, we demonstrate why it is necessary to discard the non-orientable critical points.
Remark 2.22.
(Discarding non-orientable critical points to recover singular homology)
Every index 1 critical point of depicted in Figures 2.2, 2.2, 2.4, and 2.4 is non-orientable. This is because the unstable submanifolds associated to each of these critical points is an open interval, and the action of the stabilizer of each such critical point is a 180-degree rotation of about an axis through the critical point. Thus, this action reverses the orientation of the embedded open intervals. If we were to include these index 1 critical points in the chain complex, then would have rank three, with
Note that it is not possible to define a differential on this purported chain complex with homology isomorphic to . Indeed, the correct chain complex, obtained by discarding the non-orientable index 1 critical points, has rank two:
and has vanishing differential, producing isomorphic homology .
Next, we explain why it is necessary to discard the non-orientable critical points to orient the gradient trajectories.
Remark 2.23.
(Discarding non-orientable critical points to orient the gradient trajectories)
Let and be orientable critical points in with Morse index difference equal to 1. Let be a negative gradient trajectory of from to . Because and are orientable, the value of is independent of any choice of lift of to a negative gradient trajectory of in . We define to be this value. Conversely, if one of the points or is non-orientable, then there exist two lifts of with opposite signs, making the choice dependent on choice of lift.
Recall that is defined as follows. Let and be orientable critical points then
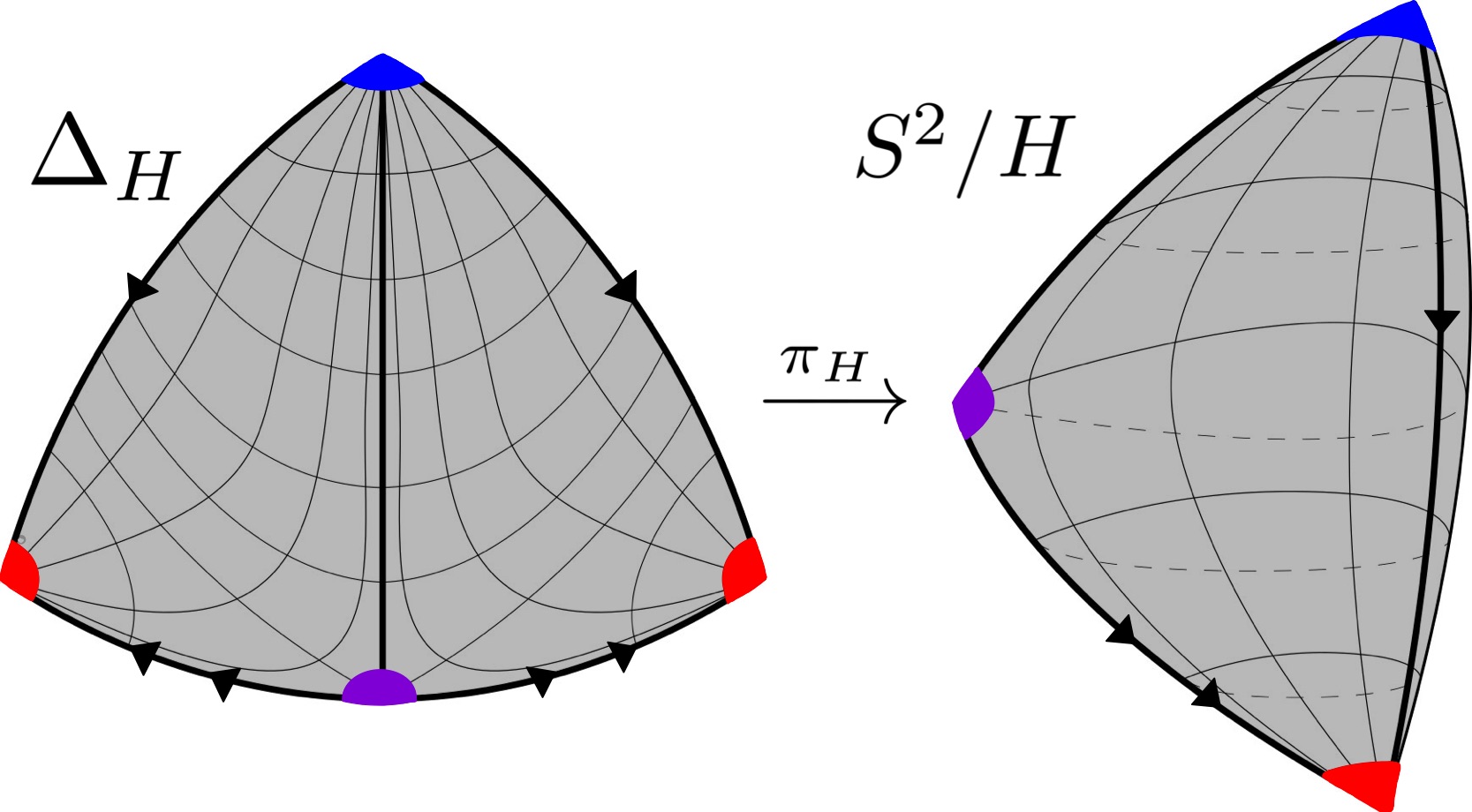
As previously mentioned, for any finite , the quotient is an orbifold 2-sphere. When is cyclic, the orbifold 2-sphere resembles a lemon shape, featuring two orbifold points, and is immediately homeomorphic to . If not cyclic, is dihedral, or polyhedral. A fundamental domain for the -action on in these two latter cases can be taken to be an isosceles, closed, geodesic triangle, denoted . These geodesic triangles are identified by the shaded regions of in Figure 2.6 for and Figure 2.6 for .
The triangular fundamental domains and for the and actions on are constructed analogously to . Ultimately, in every (non-cyclic) case, we have a closed, isosceles, geodesic triangle serving as a fundamental domain for the -action on . Applying the -identifications on the boundary of produces , a quotient that is homeomorphic to with three orbifold points. Specifically, under the surjective quotient map restricted to the closed , depicted in Figure 2.7,
In terms of the critical points we obtain:
-
•
(blue maximum) one orbifold point of has a preimage consisting of a single vertex of , this is an index 2 critical point in ;
-
•
(violet saddle) one orbifold point of has a preimage consisting of a single midpoint of an edge of , this is an index 1 critical point in ;
-
•
(red minimum) one orbifold point of has a preimage consisting of two vertices of ; both are index 0 critical points in .
Figure 2.7 depicts the attaching map for along the boundary and these points.
We now specialize to the case and study the geometry of and . This choice makes the examples and diagrams concrete; note that a choice of , , or produces similar geometric scenarios. More generally it is expected that for prequantization orbibundles that the orbifold Morse flow lines are in correspondence with -invariant holomorphic cylinders, but this has only been established in certain cases, cf. Haney-Mark [HM22] and Nelson-Weiler [NW2].
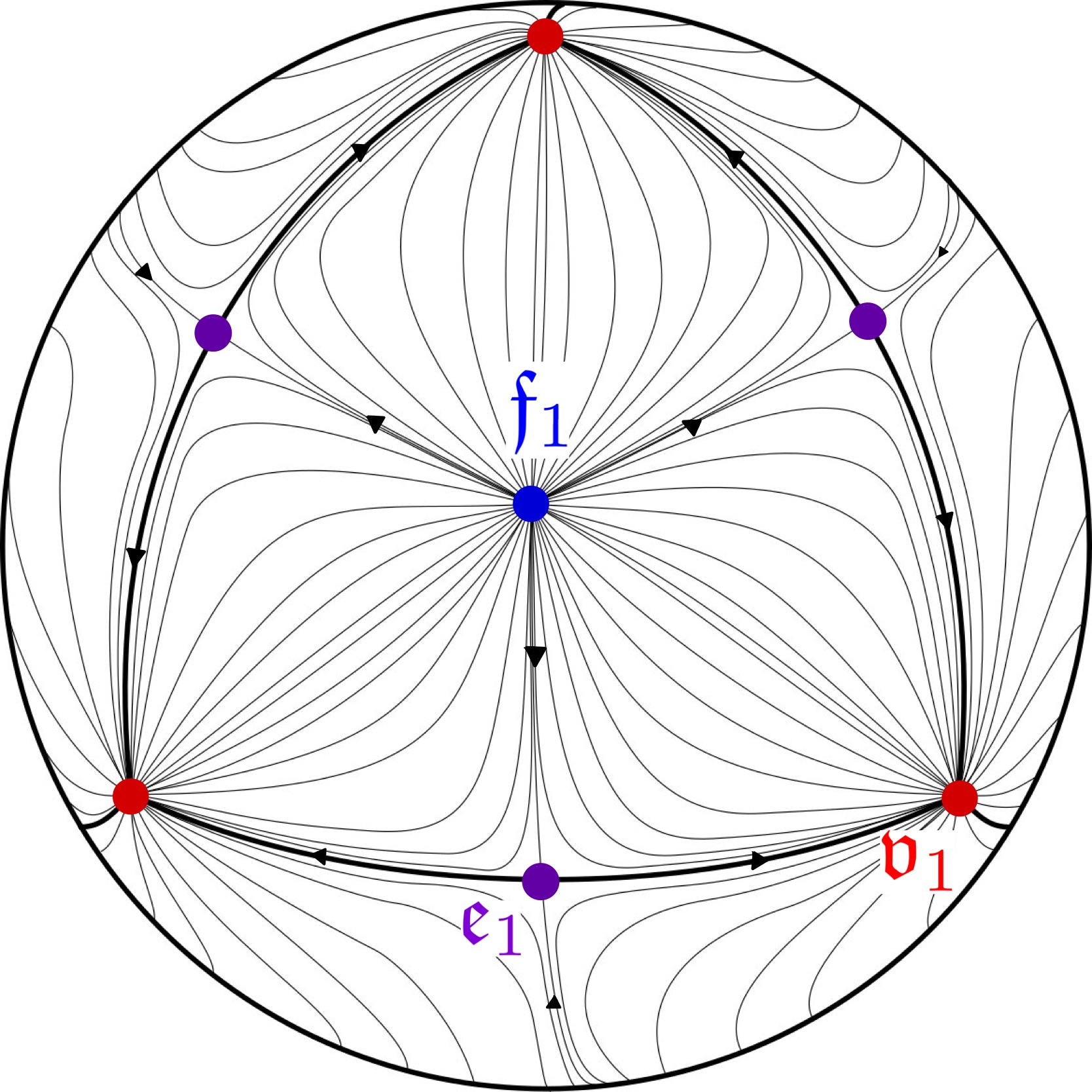
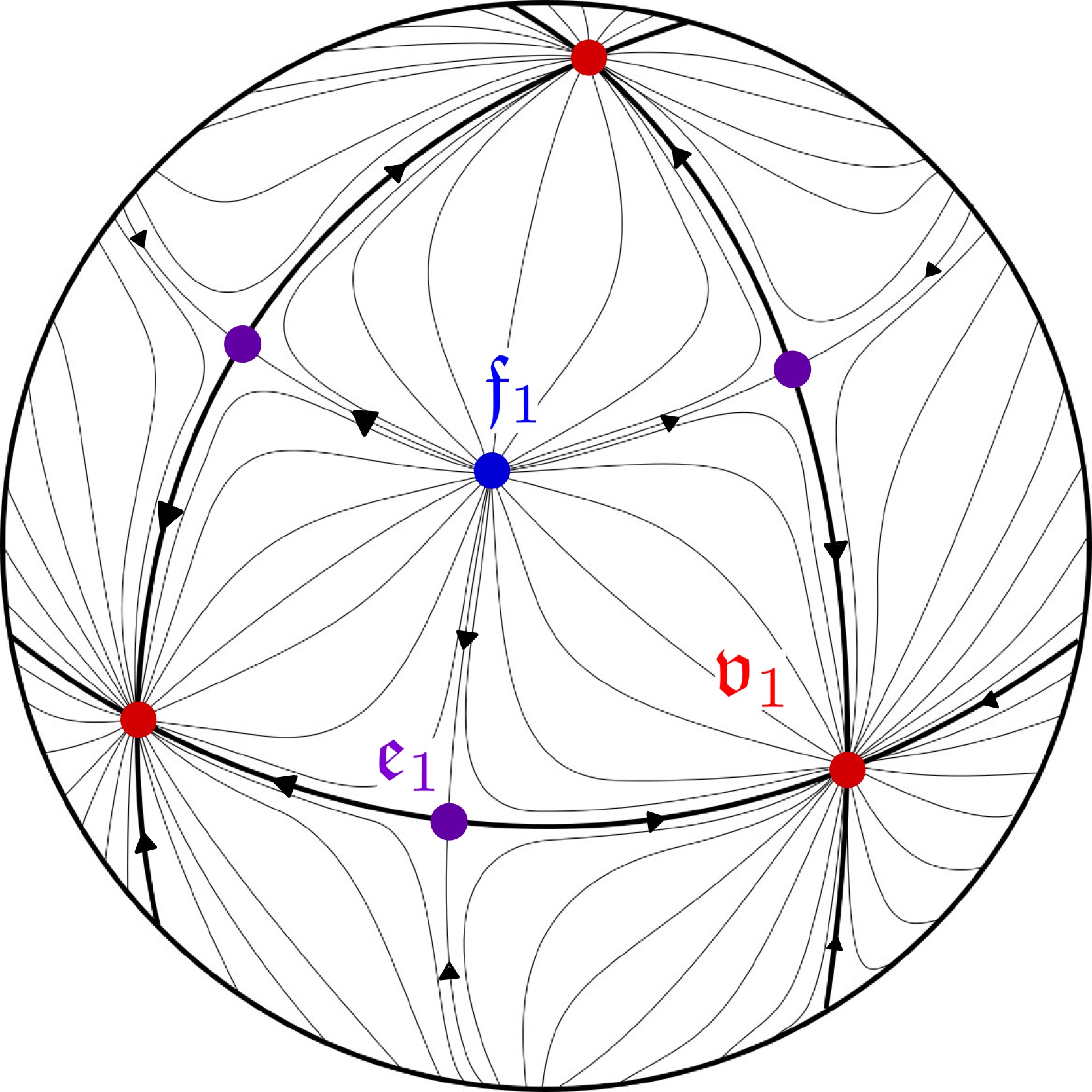
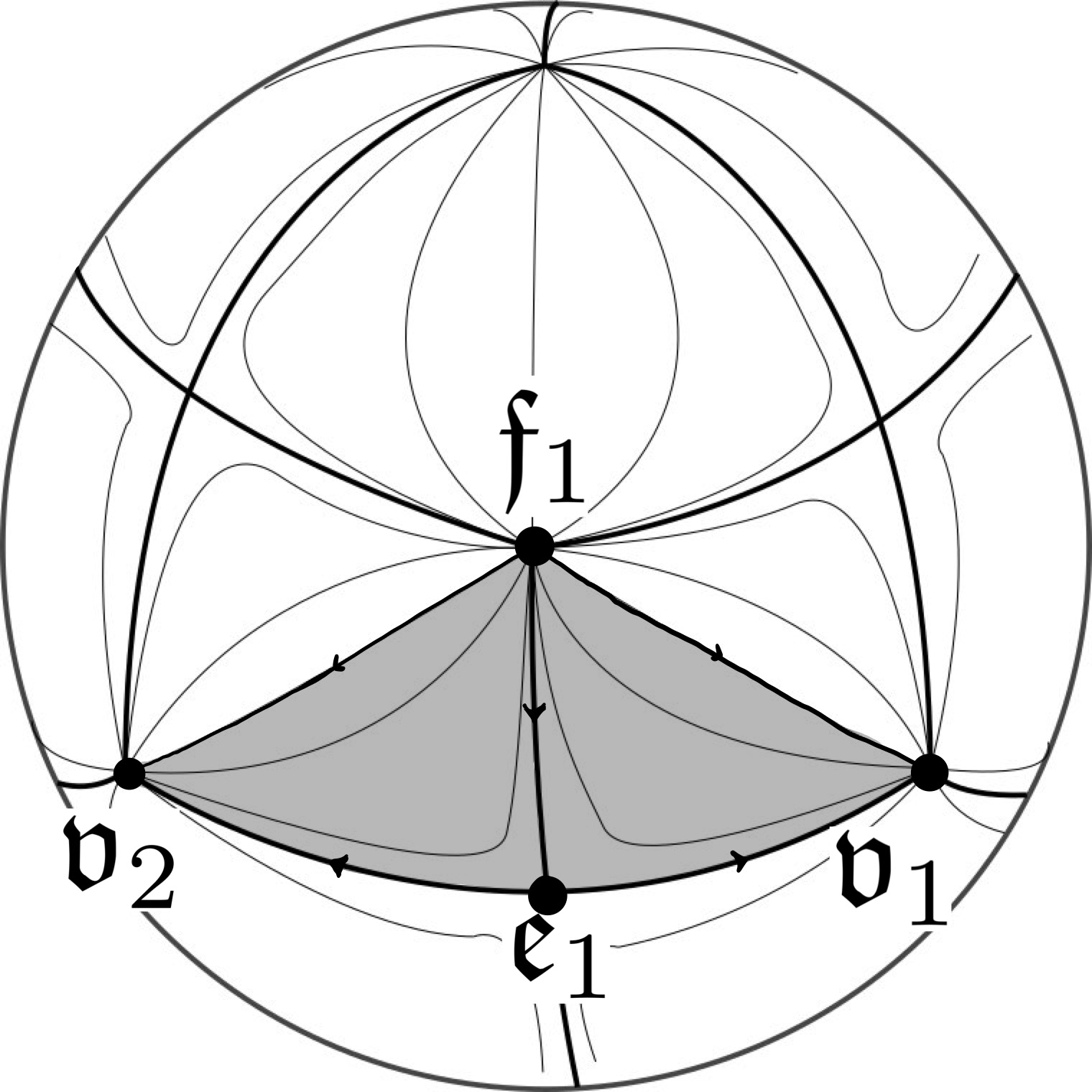
Using the notation to be introduced in Section 3.3, the three orbifold points of are denoted , , and , which are critical points of the orbifold Morse function of index 0, 1, and 2, respectively. Furthermore, for small , we have three embedded nondegenerate Reeb orbits, , , and in of , projecting to the respective orbifold critical points under . Figure 2.8 illustrates this data.
In Section 1.4 we explained how bad Reeb orbits in cylindrical contact homology are analogous to non-orientable critical points in orbifold Morse theory. We explicitly realize this analogy geometrically with . In Section 3.3, we will show that the even iterates are examples of bad Reeb orbits, and by Remark 2.22, is a non-orientable critical point of . The projection maps the bad Reeb orbits to the non-orientable critical point .
Next we consider the relationships between the moduli spaces of -holomorphic cylinders and gradient flow lines. The orders of , , and in are 6, 4, and 6, respectively (see Section 4.3.3). Thus, by the correspondence (2.13) in Section 2.4, we have the following identifications between moduli spaces of orbifold Morse flow lines of and -holomorphic cylinders in (with respect to the complex structure described in Remark 2.19):
| (2.14) | ||||
| (2.15) | ||||
| (2.16) |
Correspondences (2.14) and (2.15) are between singleton sets. Indeed, let be the unique orbifold Morse flow line from to in , and let be the unique orbifold Morse flow line from to , depicted in Figure 2.8. Then we have corresponding cylinders and from to , and from to , respectively:
| (2.17) | ||||
| (2.18) |
These cylinders are depicted in Figure 2.8. Additionally, note that the indices of the corresponding objects agree:
and
Next, we consider the third correspondence of moduli spaces in (2.16). As in Figure 2.8, we have that is diffeomorphic to a 1-dimensional open interval. For any , we have that
algebraically verifying that the moduli space of orbifold flow lines must be 1-dimensional. On the other hand, take any cylinder . Now,
verifying that this moduli space of cylinders is -dimensional, as expected by (2.16).
Note that both of the open 1-dimensional moduli spaces in (2.16) admit a compactification by broken objects. We can see explicitly from Figure 2.8 that both ends of the 1-dimensional moduli space converge to the same once-broken orbifold Morse trajectory, . In particular, the compactification is a topological , obtained by adding the single point to an open interval, and we write
An identical phenomenon occurs for the compactification of the cylinders. That is, both ends of the 1-dimensional interval converge to the same once broken building of cylinders . The compactification is a topological , obtained by adding a single point to an open interval, and we write
In Section 1.4, we argued that the differentials of cylindrical contact homology and orbifold Morse homology are structurally identical due to the similarities in the compactifications of the 1-dimensional moduli spaces. This is due to the fact that in both theories, a once broken building can serve as a limit of multiple ends of a 1-dimensional moduli space. Our examples depict this phenomenon:
-
•
The broken building of orbifold Morse flow lines serves as the limit of both ends of the open interval .
-
•
The broken building of -holomorphic cylinders serves as the limit of both ends of the open interval .
Another analogy is highlighted in this example. In both homology theories, it is possible for a sequence of flow lines or cylinders between orientable objects to break along an intermediate non-orientable object (see [CH14, Example 2.10]). For example:
-
•
There is a sequence converging to the broken building , which breaks at . The critical points and are orientable, whereas is non-orientable.
-
•
There is a sequence converging to the broken building , which breaks along the orbit . The Reeb orbits and are good, whereas is bad.
As explained in Remark 2.23, we cannot assign a value nor a value to the objects and , because they have a non-orientable limiting object. This difficulty complicates the proof that , as we cannot write the signed count as a sum involving terms of the form or . One can nevertheless show that a once broken building breaking along a non-orientable object is utilized by an even number of ends of the 1-dimensional moduli space, and that a cyclic group action on this set of even number of ends interchanges the orientations. Using this fact, one shows (see [CH14, Remark 5.3] and [HN16, §4.4]). We see this explicitly in our examples:
-
•
The once broken building is the limit of two ends of the 1-dimensional moduli space of orbifold trajectories; one positive and one negative end.
-
•
The once broken building is the limit of two ends of the 1-dimensional moduli space of orbifold trajectories; one positive and one negative end.
Remark 2.24.
(Including non-orientable objects complicates ) In Section 1.4 we saw that one discards bad Reeb orbits and non-orientable orbifold critical points as generators in cylindrical contact homology and orbifold Morse homology respectively, in order to achieve . Using our understanding of moduli spaces from Figure 2.8, we show why could not reasonably hold if we were to include the non-orientable critical point and bad Reeb orbit in the corresponding chain complexes. Suppose that we have some coherent way of assigning to the trajectories and cylinders . Now, due to equations (2.17) and (2.18), we would have in the orbifold case
where we have used that , , and . Similarly, again due to equations (2.17) and (2.18), we would have
where we have used that , , and .
Recall that the multiplicity of a -holomorphic cylinder divides the multiplicity of the limiting Reeb orbits . The following remark uses the example of this section to demonstrate it need not be the case that .
Remark 2.25.
By (2.16), is nonempty, and must contain some . We see that , so that
Suppose for contradiction’s sake that that , and consider the underlying somewhere injective -holomorphic cylinder . It must be the case that and that . The existence of such a implies that and represent the same free homotopy class of loops in . However, we will determine in Section 4.3.3 that these Reeb orbits represent distinct homotopy classes (see Table 14). Thus, is not equal to the GCD.
3 Filtered cylindrical contact homology
A finite subgroup of is either cyclic, conjugate to the binary dihedral group , or conjugate to a binary polyhedral group , , or . If subgroups and satisfy , for , then the map , , descends to a strict conactomorphism , preserving the Reeb dynamics. Thus, we compute the contact homology of for a particular choice of . The action threshold used to compute the filtered homology depends on ; for , is given by:
-
(i)
when is cyclic of order ;
-
(ii)
when is conjugate to ;
-
(iii)
when is conjugate to , , or .
3.1 Cyclic subgroups
From [AHNS17, Theorem 1.5], the positive -equivariant symplectic homology of the link of the singularity, , with contact structure , satisfies:
Furthermore, [BO17] prove that there are restricted classes of contact manifolds whose cylindrical contact homology (with a degree shift) is isomorphic to its positive -equivariant symplectic homology, when both are defined over coefficients. Indeed, we note an isomorphism by inspection when we compare this symplectic homology with the cylindrical contact homology of for from Theorem 1.2. Although this cylindrical contact homology is computed in [Ne20, Theorem 1.36], we recompute these groups using a direct limit of filtered contact homology to present the general structure of the computations to come in the dihedral and polyhedral cases.
Let be a finite cyclic subgroup of of order . If is even, with , then has nontrivial two element kernel, and is cyclic of order . Otherwise, is odd, has trivial kernel, and is cyclic of order .
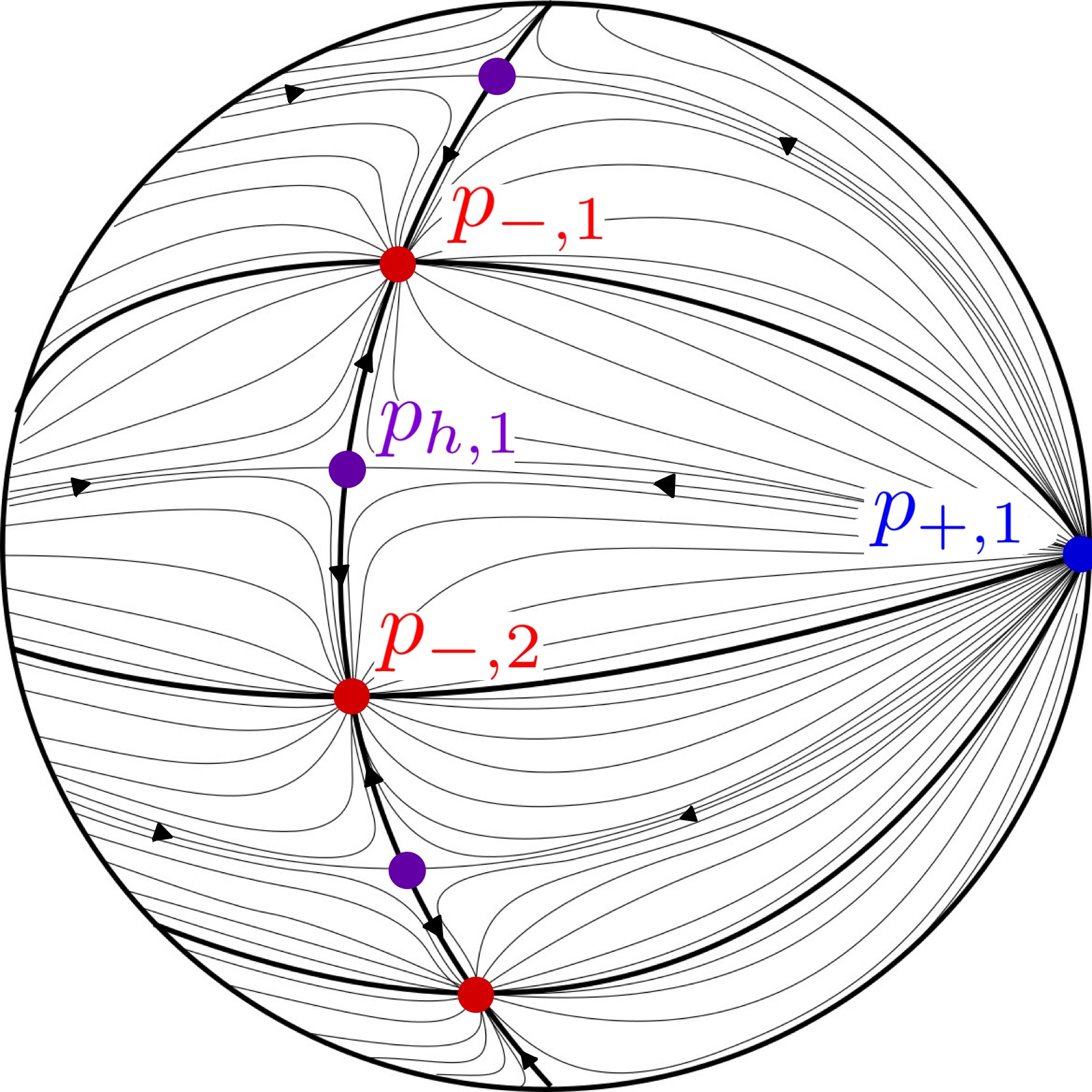
By conjugating if necessary, we can assume that acts on by rotations around the vertical axis through . The height function is Morse, -invariant, and provides precisely two fixed points; the north pole, featuring , and the south pole, where . For small , we can expect to see iterates of two embedded Reeb orbits, denoted and , of in as the only generators of the filtered chain groups. Both and are elliptic and parametrize the exceptional fibers in over the two orbifold points of .
Select . Lemma 2.15 produces an for which if , then all orbits in are nondegenerate and are iterates of or , whose actions satisfy
| (3.1) |
Thus the -filtered chain complex is -generated by the Reeb orbits and , for . With respect to the trivialization , the rotation numbers of and satisfy
(See [Ne20, §2.2] for a definition of rotation numbers.) If is sufficiently small then
| (3.2) |
For , let denote the number of with . Then:
-
•
,
-
•
for ,
-
•
,
-
•
for all other values.
By (3.2), if , then , so the orbit is not contractible. If , then by (3.2), and is not contractible. Thus, is -dynamically convex and so by [HN16, Thm. 1.3],777One hypothesis of [HN16, Thm. 1.3] requires that all contractible Reeb orbits satisfying must be embedded. This fails in our case by considering the contractible , which is not embedded yet satisfies . In the arXiv v2 of this paper, we proved in §4.3 why we do not need this additional hypothesis. a generic choice provides a well defined filtered chain complex, yielding the isomorphism
This follows from the good contributions to , which is 0 for odd , implying . This proves Theorem 1.2 in the cyclic case, because is abelian and , after appealing to Theorem 4.4, which permits taking a direct limit over inclusions of these groups.
3.2 Binary dihedral groups
The binary dihedral group has order and projects to the dihedral group , which has order , under the cover . With the quantity understood, these groups will respectively be denoted and . The group is generated by the two matrices
where is a primitive root of unity. These matrices satisfy the relations and . The group elements may be enumerated as follows:
By applying (2.4), the following matrices generate :
There are three types of fixed points in of the -action, categorized as follows:
Morse index 0: , for . We have that is a fixed point of and . Thus, is a fixed point of . These points enumerate a -orbit in , and so the isotropy subgroup of associated to any of the is of order 2 and is generated by . The point denotes the image of any under .
Morse index 1: , for . We have that is a fixed point of of and . Thus, is a fixed point of . These points enumerate a -orbit in , and so the isotropy subgroup of associated to any of the is of order 2 and is generated by . The point denotes the image of any under .
Morse index 2: and . These are the fixed points of , for , and together enumerate a single two element -orbit. The isotropy subgroup associated to either of the points is cyclic of order in , generated by . The point denotes the image of any one of these two points under .
There exists a -invariant, Morse-Smale function on , with , which descends to an orbifold Morse function , constructed in Section 2.3. Furthermore, there are stereographic coordinates at:
-
(i)
the points , in which takes the form near ;
-
(ii)
the points , in which takes the form near ;
-
(iii)
the points , in which takes the form near .
The orbifold surface is homeomorphic to and has three orbifold points. Lemma 3.1 identifies the Reeb orbits of that appear in the filtered chain complex and computes their Conley Zehnder indices.
Lemma 3.1.
Fix . Then there exists an such that for all , every is nondegenerate and projects to an orbifold critical point of under , where . If denotes the number of with , then
-
•
if or ;
-
•
for and , with all contributions by good Reeb orbits;
-
•
for even , , with all contributions by good Reeb orbits;
-
•
for odd , , and this contribution is by a bad Reeb orbit.
Proof.
Apply Lemma 2.15 to to obtain . Now, if , we have that every is nondegenerate and projects to an orbifold critical point of . We now study the actions and indices of these orbits.
Orbits over : Let denote the embedded Reeb orbit of which projects to . By Lemmas 2.14 and 2.7, lifts to an embedded Reeb orbit of in with action , projecting to some . Thus, , so . Hence, our chain complex will be generated by only the iterates. Using Remark 2.13 and Proposition 2.10, we see that the linearized Reeb flow of along with respect to trivialization is given by the family of matrices for , where we have used that and that we have stereographic coordinates at the point such that . We see that is elliptic with rotation number , thus
where the last step is valid by reducing if necessary.
Orbits over : Let denote the embedded Reeb orbit of which projects to . By Lemmas 2.14 and 2.7, lifts to an embedded Reeb orbit of in with action , projecting to some . Thus, , so . Hence, our chain complex will be generated only the iterates.
To see that is a hyperbolic Reeb orbit, we consider its 4-fold cover . By again using Remark 2.13 and Proposition 2.10, one may compute the linearized Reeb flow, noting that the lifted Reeb orbit projects to where , and that we have stereographic coordinates at such that . We evaluate the matrix at to see that the linearized return map associated to is
The eigenvalues of this matrix are . So long as is small, these eigenvalues are real and positive, so that is positive hyperbolic, implying that is also hyperbolic. If , then by Corollary 2.11, . Hence and is negative hyperbolic.
Orbits over : Let denote the embedded Reeb orbit of which projects to . By Lemmas 2.14 and 2.7, the -fold cover lifts to some embedded Reeb orbit of in with action , projecting to some . Thus, , so and so our chain complex will be generated by only the iterates. Using Remark 2.13 and Proposition 2.10, we see that the linearized Reeb flow of along with respect to trivialization is given by the family of matrices
where we have used that and that we have stereographic coordinates at such that . Thus, is elliptic with
where the last step is valid for sufficiently small . ∎
Lemma 3.1 produces the sequence , which we can assume decreases monotonically to 0 in . Define the sequence of 1-forms on by .
Summary.
(Dihedral data). We have
| (3.3) |
| (3.4) |
| Grading | Index | Orbits | |
|---|---|---|---|
| 0 | 1 | ||
| 1 | 2 | 1 | |
| 2 | 3 | ||
| ⋮ | ⋮ | ⋮ | ⋮ |
| 1 | |||
None of the orbits in the first two rows of Table 4 are contractible, thus is -dynamically convex and by [HN16, Thm. 1.3],888One hypothesis of [HN16, Thm. 1.3] requires that all contractible Reeb orbits satisfying must be embedded. This fails in our case by considering the contractible , which is not embedded yet satisfies . In the arXiv v2 of this paper, we proved in §4.3 why we do not need this additional hypothesis. a generic choice provides a well-defined filtered chain complex, yielding the isomorphism of -graded vector spaces
This follows from investigating the good contributions to , which is 0 for odd , implying . This proves Theorem 1.2 in the dihedral case because , after appealing to Theorem 4.4, which permits taking a direct limit over inclusions of these groups.
3.3 Binary polyhedral groups , , and
In contrast to the dihedral case, we opt not work with explicit matrix generators of the polyhedral groups, because the computations of the fixed points are too involved. Instead, we will take a more geometric approach. Let be some binary polyhedral group so that it is congruent to either , or , with , 48, or 120, respectively. Let denote the image of under the group homomorphism . This group is conjugate to one of , , or in , and its order satisfies . It is known that the action on is given by the symmetries of a regular polyhedron inscribed in . The fixed point set is partitioned into three -orbits. Let the number of vertices, edges, and faces of the polyhedron in question be , , and respectively (see Table 5).
Vertex type fixed points: The set constitutes a single -orbit, where each is an inscribed vertex of the polyhedron in . Let denote , so that the isotropy subgroup associated to any of the is cyclic of order . Let denote the image of any of the under the orbifold covering map .
Edge type fixed points: The set constitutes a single -orbit, where each is the image of a midpoint of one of the edges of the polyhedron under the radial projection . Let denote , so that the isotropy subgroup associated to any of the is cyclic of order . One can see that for any choice of . Let denote the image of any of the under the orbifold covering map .
Face type fixed points: The set constitutes a single -orbit, where each is the image of a barycenter of one of the faces of the polyhedron under the radial projection . Let denote , so that the isotropy subgroup associated to any of the is cyclic of order . One can see that for any choice of . Let denote the image of any of the under the orbifold covering map .
| Group | Group order | |||||||
|---|---|---|---|---|---|---|---|---|
| 12 | 4 | 6 | 4 | 3 | 2 | 3 | 7 | |
| 24 | 6 | 12 | 8 | 4 | 2 | 3 | 8 | |
| 60 | 12 | 30 | 20 | 5 | 2 | 3 | 9 |
Remark 3.2.
(Dependence on choice of ). The coordinates of the fixed point set of are determined by the initial selection of . More precisely, if for , then the rigid motion of given by takes the fixed point set of to that of .
There exists a -invariant, Morse-Smale function on , with , which descends to an orbifold Morse function , constructed in Section 2.3. Furthermore, there are stereographic coordinates at
-
(i)
the points , in which takes the form near ;
-
(ii)
the points , in which takes the form near ;
-
(iii)
the points , in which takes the form near .
The orbifold surface is homeomorphic to and has three orbifold points. Lemma 3.3 identifies the Reeb orbits of that appear in the filtered chain complex and computes their Conley Zehnder indices. Let denote the integer (equivalently, , see Table 5).
Lemma 3.3.
Fix . Then there exists an such that, for all , every is nondegenerate and projects to an orbifold critical point of under , where . If denotes the number of with , then
-
1.
if or ,
-
2.
for and , with all contributions by good Reeb orbits;
-
3.
for even , , with all contributions by good Reeb orbits;
-
4.
for odd , , and this contribution is by a bad Reeb orbit.
Proof.
Apply Lemma 2.15 to to obtain . If , then every is nondegenerate and projects to an orbifold critical point of . We investigate the actions and Conley Zehnder indices of these three types of orbits. Our reasoning will largely follow that used in the proof of Lemma 3.1, and so some details will be omitted.
Orbits over : Let denote the embedded Reeb orbit of in which projects to . One computes that , and so the iterates are included for all . The orbit is elliptic with:
Orbits over : Let denote the embedded Reeb orbit of in which projects to . By a similar study of the orbit of Lemma 3.1, one sees that , so the iterates are included for all . Like the dihedral Reeb orbit , is negative hyperbolic with , thus . The even iterates of are bad Reeb orbits.
Orbits over : Let denote the embedded Reeb orbit of in which projects to . One computes that , and so the iterates are included for all . The orbit is elliptic with:
∎
Lemma 3.3 produces the sequence . Define the sequence of 1-forms on by .
Summary.
(Polyhedral data). We have
| (3.5) |
| (3.6) |
| Grading | Index | Orbits | |
|---|---|---|---|
| 0 | 1 | ||
| 1 | 2 | 1 | |
| 2 | 3 | ||
| ⋮ | ⋮ | ⋮ | ⋮ |
| 1 | |||
None of the orbits in the first two rows of Table 6 are contractible, so is -dynamically convex and so by [HN16, Theorem 1.3],999One hypothesis of [HN16, Th. 1.3] requires that all contractible Reeb orbits satisfying must be embedded. This fails in our case by considering the contractible , which is not embedded yet satisfies . In the arXiv v2 of this paper, we proved in §4.3 why we do not need this additional hypothesis. a generic choice provides a well defined filtered chain complex, yielding the isomorphism of -graded vector spaces
4 Direct limits of filtered cylindrical contact homology
In the previous section we computed the action filtered cylindrical contact homology of the links of the simple singularities. For any finite, nontrivial subgroup , we have a sequence , where monotonically in , is an -dynamically convex contact form on with kernel , and is generically chosen so that
| (4.1) |
where . For , there is a natural inclusion of the vector spaces on the right hand side of (4.1).
This section establishes Theorem 4.4, yielding that exact symplectic cobordisms obtained from decreasing the Morse-Bott perturbation induce well-defined maps on filtered homology, which can be identified with these inclusions, which completes the proof of Theorem 1.2 as
We first explain the cobordisms and the maps they induce.
Definition 4.1.
An exact symplectic cobordism is from to is a pair where is a compact symplectic manifold with boundary and is a symplectic form on with . Given an exact symplectic cobordism , we form its completion
using the gluing under the following identifications. A neighborhood of in can be canonically identified with for some so that is identified with . Moreover, this identification is defined so that corresponds to the unique vector field such that . Similarly, a neighborhood of can be canonically identified with so that is identified with .
An almost complex structure on the completion is said to be cobordism compatible if is -compatible on (meaning that is a Riemannian metric on ), and there are -compatible almost complex structures on such that agrees with on and with on .
We will make use of some further notation.
Notation 4.2.
For and , we write whenever and both orbits project to the same orbifold point under . If either condition does not hold, we write . Note that defines an equivalence relation on the disjoint union . If is contractible in , then we write in .
In the following, we consider cobordism maps induced by decreasing the Morse-Bott perturbation. We more precisely define the exact completed cobordism and space of cobordism compatible almost complex structures that we will use below.
Definition 4.3.
We want to ensure that there are ‘obvious’ index zero cylinders, which we henceforth refer to as cobordism trivial cylinders connecting the nondegenerate Reeb orbits and satisfying . To do so, we will restrict to the following contractible space of satisfying the following conditions.
Since , we know for some . We may assume everywhere. Let such that
-
•
for for some ;
-
•
for for some ;
-
•
.
Since is symplectic, is an exact symplectic cobordism from to .
Let be a cobordism compatible almost complex structure on , which agrees with , a generic -compatible almost complex structure on , and with , a generic -compatible almost complex structure on . We can choose so that the cobordism trivial cylinder connecting to , where is a -holomorphic curve because is a -holomorphic submanifold, is a -holomorphic submanifold, and the compact portion connecting them, defined by the union of the Reeb orbits of in the same equivalence class, is a symplectic submanifold of . Note that the space of satisfying these conditions is contractible.
Next we consider the space of Fredholm index zero -holomorphic cylinders in , denoted by , where is subject to the conditions in Definition 4.3, , and . We will show that is a compact 0-manifold, which is nonempty only when and that . From this, the map , defined by
is well defined. That is a chain map follows from a careful analysis of the moduli spaces of index 1 cylinders that appear in these completed cobordisms. These chain maps induce continuation homomorphisms on the cylindrical contact homology groups. Our main result in Section 4 is the following:
Theorem 4.4.
An exact completed symplectic cobordism from to as in Definition 4.3, for , induces a well defined chain map between filtered chain complexes. The induced maps on homology may be identified with the standard inclusions
and form a directed system of graded -vector spaces over .
There are two main steps in the proof of Theorem 4.4. The first is to establish compactness of the 0-dimensional moduli spaces. This is shown in Section 4.1 via the study of free homotopy classes of Reeb orbits in Section 4.3. The second is to establish that the so-called cobordism trivial cylinders are unique, namely that . This is carried out in Section 4.2 and relies on intersection theoretic arguments of Hutchings [Hu02b, Hu09] and Siefring [Si11], as elucidated by Wendl [We20], in conjunction with establishing that the theoretical bounds on the winding of asymptotic eigenfunctions are achieved via a strengthening of results due to Hofer, Wysocki, and Zehnder [HWZ95].
The proof of Theorem 4.4 is as follows. Automatic transversality will be used in Corollary 4.8 to prove that is a 0-dimensional manifold. By Proposition 4.7, will be shown to be compact. From this, one concludes that is a finite set for and . Thus for , we have the well-defined chain map:
The uniqueness result of Section 4.2 allows us to conclude that the finite set of cylinders in , equals that of and that of , the moduli spaces of cylinders in the symplectizations of and , which is known to be 1, given by the contribution of a single trivial cylinder. If , then Corollary 4.8 will imply that is empty, and so . Ultimately we conclude that, given , our chain map takes the form , where is the unique Reeb orbit satisfying .
We let denote the chain map given by the inclusion of subcomplexes,
The composition a chain map. Let denote the map on homology induced by this composition, that is, . We see that
satisfies whenever , and thus takes the form of the standard inclusions after making the identifications (4.1).
4.1 Compactness
A holomorphic building is a tuple , where each is a potentially disconnected holomorphic curve in a completed (exact) symplectic cobordism equipped with a cobordism compatible almost complex structure. The curve is the level of . Each has a set of positive (resp. negative) ends which are positively (resp. negatively) asymptotic to a set of Reeb orbits. For , there is a bijection between the negative ends of and the positive ends of , such that paired ends are asymptotic to the same Reeb orbit. The height of is . The positive ends of are given by the positive ends of and the negative ends of are given by the negative ends of . The genus of is the genus of the Riemann surface obtained by attaching ends of the domains of the to those of according to the bijections; is connected if is connected. The index of is .
All buildings that we consider will have at most one level in a nontrivial exact symplectic cobordism, with the rest in a symplectization. Unless otherwise stated, we require that no level of be solely given in terms of a union of trivial cylinders in a symplectization, e.g. is without trivial levels.
Remark 4.5.
The index of a connected genus 0 building with one positive end at , and with negative ends at , is given by:
| (4.2) |
This fact follows from an inductive argument applied to the height of .
The following proposition considers the relationships between the Conley Zehnder indices and actions of a pair of Reeb orbits representing the same free homotopy class in .
Proposition 4.6.
Suppose for and .
-
(a)
If then .
-
(b)
If then .
The proof of Proposition 4.6 is postponed to Section 4.3, where we will show that it holds for cyclic, dihedral, and polyhedral groups (Lemmas 4.23 and 4.24, and Proposition 4.29). For any exact symplectic cobordism , Proposition 4.6 (a) implies that is empty whenever , and (b) crucially implies that there do not exist cylinders of negative Fredholm index in . Using Proposition 4.6, we now prove a compactness argument:
Proposition 4.7.
Fix , , and . For , consider a connected, genus zero building , where is in the symplectization of for , is in the symplectization of for , and is in a generic, completed, exact symplectic cobordism from to . If , with single positive puncture at and single negative puncture at , then and .
Proof.
This building provides the following sub-buildings, some of which may be empty:
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/dd056d39-a9d3-49dc-ace9-a9b5702cbab2/BuildingV2.jpg)
-
•
, a building in the symplectization of , with no level consisting entirely of trivial cylinders, with one positive puncture at , negative punctures at , for , with for , and .
-
•
, a height 1 building in the cobordism with one positive puncture at , negative punctures at , for , with for , and .
-
•
, a building with one positive end at , without negative ends, for .
-
•
, with one positive end at , without negative ends, for .
-
•
, a building in the symplectization of , with one positive puncture at and one negative puncture at .
Contractible Reeb orbits are shown in red, while Reeb orbits representing the free homotopy class are shown in blue. Each sub-building is connected and has genus zero. Although no level of consists entirely of trivial cylinders, some of these sub-buildings may have entirely trivial levels in a symplectization. Note that equals the sum of indices of the above buildings. Write , where
We will first argue that , , and .
To see , apply the index formula (4.2) to each summand to compute . If , then Proposition 4.6 (b) implies , which would violate the fact that action decreases along holomorphic buildings. We must have that .
To see , again apply the index formula (4.2) to find . Suppose . Now Proposition 4.6 (b) implies , contradicting the decrease of action.
To see , consider that either consists entirely of trivial cylinders, or it doesn’t. In the former case . In the latter case, [HN16, Prop. 2.8] implies that .
Because 0 is written as the sum of three non-negative integers, we conclude that . We will combine this fact with Proposition 4.6 to conclude that are empty buildings and that is a cylinder, concluding the proof.
Note that implies . Because , Proposition 4.6 (a) implies that . This is enough to conclude , and importantly, . Noting that (again, by decrease of action), we must have that and that this inequality is an equality. Thus, the buildings are empty for , and the building has index 0 with only one negative end, . If has some nontrivial levels then [HN16, Prop. 2.8] implies . Thus, consists only of trivial levels. Because has no trivial levels, it is empty, and .
Similarly, implies . Again, because , Proposition 4.6 (a) implies that . Although we cannot write , we can conclude that the difference may be made arbitrarily small, by rescaling by some . Thus, the inequality forces , implying that each is empty, and that has a single negative puncture at , i.e. for .
Finally, we consider our index 0 building in the symplectization of , with one positive end at and one negative end at . Again, [HN16, Prop. 2.8] tells us that if has nontrivial levels, then . Thus, all levels of must be trivial (this implies ). However, because the and are empty, a trivial level of is a trivial level of itself, contradicting our hypothesis on . Thus, is empty and . ∎
Corollary 4.8.
The moduli space is a compact, 0-dimensional manifold for generic , where and are good, and . Furthermore, is empty if .
Proof.
To prove regularity of the cylinders , we invoke automatic transversality ([Wen10, Thm. 1]), providing regularity of all such , because the inequality
holds. Here, is the number of branched points of over its underlying somewhere injective cylinder, is the genus of the curve, and is the number of ends of asymptotic to positive hyperbolic Reeb orbits. Because good Reeb orbits in and are either elliptic or negative hyperbolic, we have that . To prove compactness of the moduli spaces, note that a sequence in has a subsequence converging in the sense of [BEHWZ03] to a building with the properties detailed in Proposition 4.7. Proposition 4.7 proves that such an object is single cylinder in , proving compactness of . Finally, by Proposition 4.6 (a), the existence of implies that . Thus, implies that is empty. ∎
4.2 Uniqueness of cobordism trivial cylinders
The purpose of this section is to prove uniqueness of cobordism trivial cylinders. The main technical obstruction to carrying out a proof of this is that in the Morse-Bott limit, these cylinders are no longer isolated but come in families, so one cannot naively invoke [Wen-SFT, Thm. 10.32]. However, since we are in dimension four, we can appeal to some intersection theory due to Hutchings and Siefring, as summarized by Wendl to establish the desired result, namely that . Our arguments rely on the special situation at hand, because the theoretical bounds on the winding of asymptotic eigenfunctions controlling the approach of the cylinders at infinity is achieved, by way of a strengthening of results originating in the work of Hofer, Wysocki, and Zehnder. We first give a brief, mostly contained summary of the results utilized, and then combine them give the proof of our main result below.
Proposition 4.9.
Let be an exact completed symplectic cobordism from to as in Definition 4.3, for . Then .
First, we recall some results about the asymptotics of holomorphic curves and the winding of the associated eigenfunctions. Next we give a mostly self contained review of intersection theory. Finally, we put everything together to give a proof of uniqueness of cobordism trivial cylinders.
4.2.1 Winding of asymptotic eigenfunctions
Let be a nondegenerate embedded Reeb orbit. W define the asymptotic operator from the space of smooth sections of to itself by
where denotes the connection on defined by the linearized Reeb flow along . The operator is symmetric and so its eigenvalues are real. Nondegeneracy of the Reeb orbit implies that does not have any nonzero section which is parallel with respect to , and so zero is not an eigenvalue of .
We first recall some facts pertaining to the spectral properties of the asymptotic operator and the winding numbers of its eigenfunctions, going back to [HWZ95, §3].
Lemma 4.10.
-
(a)
Every (nonzero) eigenfunction of is a nonvanishing section of , and hence has a well defined winding number (with respect to a chosen unitary trivialization of ), which we denote by . Any two nontrivial eigenfunctions in the same eigenspace have the same winding number.
-
(b)
Let and be linearly independent eigenfunctions of with the same winding number. Then any nontrivial linear combination of and is a nonvanishing section of .
-
(c)
If and are eigenfunctions of with eigenvalues then .
-
(d)
For every , has exactly two eigenvalues (counting multiplicity) for which the corresponding eigenfunctions have winding number equal to .
Definition 4.11.
Given a nondegenerate closed Reeb orbit and a trivialization , we define
by where is the expression via of any nontrivial eigenfunction with . By way of Lemma 4.10, we can sensibly define the positive / negative extremal winding numbers to be:
The parity of a Reeb orbit is given by:
which is equal to 0 when is positive hyperbolic or an even iterate of a negative hyperbolic orbit and 1 when is elliptic or an odd iterate of a negative hyperbolic orbit, cf. [Wen-SFT, §3].
From [HWZ95, §3], we also have the following definition for the Conley-Zehnder index in terms of the winding invariants. For any nondegenerate Reeb orbit and any trivialization of we have
| (4.3) |
Next we review how the asymptotic behavior of the end of an asymptotically cylindrical -holomorphic curve at a Reeb orbit is determined by an asymptotic eigenfunction of the corresponding asymptotic operator. First, to warm up and set up some notation, we recall what it means for a -holomorphic half cylinders to be asymptotically cylindrical to a Reeb orbit . Denote the positive and negative half-cylinders by
A -holomorphic half-cylinder is said to be (positively / negatively) asymptotic to a nondegenerate -periodic Reeb orbit if, after a positive reparametrization near infinity,
| (4.4) |
where the exponential map is assumed to be translation invariant and is a vector field along the trivial cylinder101010The trivial cylinder is the -holomorphic “orbit cylinder” where is -invariant, which is expressed as , where is the period of the orbit . with in as . Thus as approaches infinity, becomes close to the trivial cylinder, which is an immersion with normal bundle equivalent to
After a further reparametrization of , we can arrange for (4.4) to hold for a unique section ; the section is called the asymptotic representative of . The uniqueness of depends on the choice of parametrization of the Reeb orbit ; different choices change by a shift in the -coordinate.
Proposition 4.12.
[HWZ96], [HT09, Prop. 2.4] Suppose is a -holomorphic half cylinder which is positively/negatively asymptotic to the nondegenerate Reeb orbit and let denote its asymptotic representative. Then if is not identically zero, there exists a unique nontrivial eigenfunction of with
and a section satisfying uniformly as such that for sufficiently large ,
| (4.5) |
In the context of Proposition 4.12, we say that approaches the Reeb orbit along the asymptotic eigenfunction with decay rate . This proposition establishes the asymptotic approach between the half cylinder given by the end of and the trivial cylinder . A similar result holds for any two curves approaching the same orbit, and from this one can establish a lower bound on the resulting “relative” decay rate and a generalization of this asymptotic formula to “higher orders” was established in [Si08, §2].
Remark 4.13.
In particular, the asymptotic representative encodes the isotopy class of the braid , which is given in terms of the intersection of the end of the -holomorphic curve asymptotic to and a tubular neighborhood of for . Let be a tubular neighborhood of which has been identified with a disk bundle in the normal bundle to as well as in so that corresponds to and the derivative of the identification along sends to in agreement with the unitary trivialization . Let be an asymptotically cylindrical -holomorphic curve with a positive (or negative) end at , which is not part of a multiply covered component. Then results of Siefring [Si08, Cor. 2.5, 2.6] allow us to conclude that if is sufficiently large then the intersection of this end of with is a braid , whose isotopy class is independent of .
We conclude by providing the following bounds on the winding number in terms of the Conley-Zehnder index. We deduce that the ends of the -holomorphic curves in meet the extremal bounds, by way of a mild generalization of arguments previously appearing in [HWZ95, §3], [HN16, Lem. 3.2], [HT09, §3].
Lemma 4.14.
[HWZ95, §3], [HN16, Lem. 3.2] Let be an exact completed symplectic cobordism from to as in Definition 4.3, for . Let be an embedded Reeb orbit, let be a -holomorphic curve in with a positive end at and a single negative end. Let denote the intersection of an end with . If is sufficiently large, then
-
(a)
is the graph in of a nonvanishing section of and thus has a well-defined winding number .
-
(b)
-
(c)
If is odd and , then equality holds in (b).
Proof.
Choose an identification compatible with the trivialization . The asymptotic behavior of pseudoholomorphic curves as described in conjunction with Lemma 4.10 above implies (a).
Hofer, Wysocki, and Zehnder demonstrated in [HWZ95, §3] that for each integer , there are exactly two eigenvalues of whose eigenfunctions have winding number . (Here and below we count eigenvalues with multiplicity.) Moreover, larger winding numbers correspond to larger eigenvalues, and the largest possible winding number for a negative eigenvalue is , thus (b) follows.
To establish (c), note that the same argument in [HWZ95, §3] also shows that the smallest possible winding number of an eigenfunction of with positive eigenvalue is . Since is assumed odd, we have a strict inequality . Consequently, the two (possibly equal) eigenvalues of whose eigenfunctions have winding number are both negative. Thus, if equality does not hold in (b), then the associated eigenvalue is not one of the two largest negative eigenvalues of (counted with multiplicity as usual).
Wendl observed that one can use exponentially weighted Sobolev spaces to set up the moduli space of irreducible holomorphic curves in which the eigenvalue is not one of the two largest negative eigenvalues, see [HT09, Rmk. 3.3], but beware of their sign convention for the asymptotic operator.
Automatic transversality holds under the assumptions in (c), e.g. [Wen10, Thm. 1], because
since , the number of ends of asymptotic to positive hyperbolic Reeb orbits. Thus any curves in this moduli space are cut out transversely, but the dimension of the moduli space is less than usual. Consequently there are no -holomorphic curves in this moduli space with .
∎
Symmetrically to Lemma 4.14, we also have the following:
Lemma 4.15.
Let be an embedded Reeb orbit, let be a -holomorphic curve in with a negative end at which is not part of a trivial cylinder in with chosen to be -invariant, and a single positive end let denote the intersection of this end with . If , then the following hold:
-
(a)
is the graph of a nonvanishing section of , and thus has a well-defined winding number .
-
(b)
.
-
(c)
If is odd and , then equality holds in (b).
4.2.2 Recap of intersection theory
We now briefly review some intersection theory due to Hutchings [Hu02b, Hu09] and Siefring [Si08, Si11], which has been nicely summarized by Wendl [We20]. The Siefring intersection pairing gives a relation between homotopy invariant quantities that have geometric meanings independent of any choice of trivializations and surface representatives of the holomorphic curves. This improves upon Hutchings’ work, which defined a relative intersection pairing and provided a relative adjunction formula for somewhere injective asymptotically cylindrical curves.
Theorem 4.16 ([Si11], [We20, Thm. 4.1]).
For any two asymptotically cylindrical maps in a 4-dimensional completed symplectic cobordism with and with nondegenerate asymptotic Reeb orbits, there exists the so-called Siefring intersection pairing
which satisfies the following properties.
-
(a)
The pairing depends only on the homotopy classes of and as asymptotically cylindrical maps.
-
(b)
If and are asymptotically cylindrical -holomorphic curves that have nonidentical images then
(4.6) where is the usual algebraic count of intersections which is nonnegative by intersection positivity and is a nonnegative integer realizing “hidden intersections at infinity.”
Remark 4.17.
There is the following Folk Theorem, which we do not make use of, but helps elucidate the Siefring intersection pairing, whose statement is as follows. In Theorem 4.16(b), there exists a perturbation which is close to and a pair of -holomorphic asymptotically cylindrical curves and having the same domains as and and close to and in their respective modui spaces, such that
Thus we should interpret as the count of intersections between generic curves homotopic to and .
An important corollary of Theorem 4.16 that we will make use of is as follows.
Corollary 4.18.
If and are -holomorphic curves satisfying then any two -holomorphic curves that have nonidentical images and are homotopic to and respectively are disjoint.
The final foundational result that we need concerns nonnegativity of asymptotic intersections.
Theorem 4.19 ([We20, Thm. 4.13]).
If and are asymptotically cylindrical -holomorphic maps with nonidentical images, then with equality if and only if for all pairs of ends of and respectively asymptotic to covers of the same Reeb orbit, all of the resulting relative asymptotic eigenfunctions have extremal winding.
To actually compute , we need a few more notions, including the relative intersection number, which is due to Hutchings [Hu02b, Hu09]. The relative intersection number is denoted in the work of Siefring and Wendl by . The relative intersection pairing previously appeared in Hutchings’ work as one of the a key ingredients to the definition of embedded contact homology, where it is denoted by and was established to depend only on the homotopy class of the trivialization and relative homology class of the curves. These intersection numbers coincide:
(We go into further details in regards to how to more precisely define and compute the relative intersection number for -holomorphic cylinders à la Hutchings in the proof of Lemma 4.22.)
In the interim, a colloquial description is that the relative intersection number is an algebraic count of intersections between and a generic perturbation of so that they have at most finitely many intersections and the perturbation of is shifted by an arbitrarily small positive distance in directions determined by the chosen trivialization at infinity. (One could symmetrically perturb and leave alone.)
If and have finitely many intersections then the algebraic intersection number is well-defined. In this situation,
| (4.7) |
where is a count of additional intersections near infinity that appear when is perturbed, because the perturbation of can be assumed to be nontrivial only in some neighborhood of infinity where and are disjoint. (Again, the content of (4.7) previously appeared in the work of Hutchings with different notation, which we elucidate in the proof of Lemma 4.22, including the definition of .)
Modulo having deferred more precise definitions of and to later, we are nearly ready to define the trivialization independent asymptotic intersection count, The last ingredient we need are the terms , which are the theoretical bounds on the possible asymptotic winding of ends of around the ends of , as discussed in Section 4.2.1, and defined below.
Definition 4.20.
Assume and are asymptotically cylindrical -holomorphic curves, so that and approach their respective covers of (both at either a negative end or both at a positive end) along asymptotic eigenfunctions and with decay rates and , respectively. We define the theoretical extremal bounds at a positive / negative puncture by
We extend the definition of by setting
As explained in [We20, §4.2], these theoretical extremal bounds provides a universal lower bound on , namely
where denote the positive negative punctures of and denotes the associated Reeb orbit to which the puncture asymptotes, and likewise for .
We can now define the Siefring intersection pairing in terms of these more concrete and computable terms as follows.
Definition 4.21.
For asymptotically cylindrical maps and with finitely many intersections, we define
and similarly for any asymptotically cylindrical maps and (with)not necessarily with finitely many intersections), we can define
Crucially, the results in Section 4.2.1 will allow us to conclude that in the case of interest, the winding numbers are extremal in the sense that they achieve the corresponding theoretical bound.
We have one last computational ingredient that we will rely on, cf. [We20, Ex. 4.19(b)], detailing some of the aforementioned notions along the way as we proceed with the proof.
Lemma 4.22.
Let be an exact completed symplectic cobordism from to as in Definition 4.3, for . Let be the cobordism trivial cylinder between orbits in the same equivalence class, which are further assumed to be either both elliptic or both odd iterates of a negative hyperbolic Reeb orbit. Then the Siefring self-intersection pairing is given by the multiplicity of the Reeb orbit equivalence class:
| (4.8) |
Proof.
By Definition 4.21
| (4.9) |
Here is the relative intersection number, which appears in the ECH literature as which we detail further and compute to be 0. We compute momentarily in (4.10).
Using the definition of the relative intersection pairing by Hutchings [Hu09, §2.7], it follows that the relative intersection number of any cobordism trivial cylinder is 0, e.g. that
To elucidate this point, recall that the relative intersection number of any -holomorphic curve is a well-defined algebraic count of interior intersections of two compact oriented surfaces whose interiors are transverse and do not intersect at the boundary representing , where , whose definition in the case when is a cylinder we more precisely explain as follows.
If is one of these so called admissible representatives of a -holomorphic cylinder (with one positive end at and one negative end at ), then for sufficiently small, consists of a braid with strands in a tubular neighborhood of , which is well-defined up to isotopy. Likewise consists of a braid with strands in a tubular neighborhood of , which is well-defined up to isotopy. (Here are embedded Reeb orbits.)
The linking number of two disjoint braids and around an embedded Reeb orbit is denoted by and is defined to be the linking number of the oriented links and in , where is an embedding of the tubular neighborhood of which has been identified via the trivialization with , so that the projection of to to is a submersion, which has further been identified with a solid torus in , cf. [Hu09, §2.6] for more details. The linking number is by definition, one half of the signed count of crossings of a strand of with a strand of in the projection to . The sign convention is that counterclockwise twists count positively, which differs from knot theory literature [Hu02b, §3.1].
In the case of the aforementioned cylinder , we define the linking number
for more general -holomorphic curves, one obtains a collection of disjoint braids, whose linking numbers one sums over. The linking number as defined above is Siefring’s relative asymptotic intersection number with an opposite sign convention for the two punctures.
The relative intersection pairing is defined by
and one further denotes With the proceeding understood, we can now see by the definition detailed above that
as claimed.
The remaining terms in (4.9), are the theoretical bounds on the possible relative asymptotic winding of ends of around itself at the appropriate puncture. By definition, for we have that
| (4.10) |
Here corresponds to the positive asymptotic orbit of at the puncture and corresponds to the negative asymptotic orbit of at the puncture .
In the below, let
Thus (4.9) can be computed to be
Here the last line follows from a basic manipulation of the Conley-Zehnder index formula (4.3) in terms of the positive and negative extremal winding numbers and parity of the orbit, yielding
Here is the parity of the Reeb orbit , which is by definition is 1 whenever is elliptic or an odd multiple of a negative hyperbolic orbit. ∎
4.2.3 Proof of Proposition 4.9
We now combine Sections 4.2.1 and 4.2.2 to establish the desired uniqueness of cobordism trivial cylinders as follows.
Proof of Proposition 4.9.
In the below, denote to be the cobordism trivial cylinder between and , where , , and . Let be a curve with the same asymptotics, which is not a cobordism trivial cylinder. In particular, and have nonidentical images.
Recall that by Theorem 4.19 the count of “hidden intersections at infinity” satisfies
with equality if and only if for all pairs of ends of and respectively asymptotic to covers of the same Reeb orbit, all of the resulting relative asymptotic eigenfunctions have extremal winding. We established that the resulting relative asymptotic eigenfunctions have extremal winding in §4.2.1, cf. Lemmas 4.14 and 4.15.
Thus the Siefring intersection ‘*’ number coincides with the algebraic intersection ‘’ number:
which must be non-negative by the positivity of intersections (cf. [We20, App. B]), with equality if and only if and are disjoint by Corollary 4.18. However, the Siefring intersection number depends only on the homotopy classes of and as asymptotically cylindrical maps by Theorem 4.16(a). We computed that all asymptotically cylindrical maps with the same asymptotics and relative homology class have negative Siefring intersection number in Lemma 4.22, a contradiction. Thus and must have identical images, hence , as desired. ∎
4.3 Homotopy classes of Reeb orbits and proof of Proposition 4.6
Proposition 4.6 was key in arguing compactness of . To prove Proposition 4.6, we will make use of a bijection to identify the free homotopy classes represented by orbits in in terms of . A loop in is a map , satisfying . Selecting a lift of to determines a unique , for which . The map is well defined, bijective, and respects iterations; that is, if , then for .
4.3.1 Cyclic subgroups
We may assume that , where is the diagonal matrix , and . We have , each class is a singleton because is abelian. We select explicit lifts and of and to given by:
Because , , and thus for . Similarly, because , , and thus for .
| Class | Represented orbits |
| , for |
Lemma 4.23.
Suppose for and .
-
(a)
If then .
-
(b)
If then .
Proof.
Write , for some . To prove (a), assume . Recall the Conley Zehnder index formulas (3.2) from Section 3.1:
| (4.11) |
We first argue that both project to the same orbifold point. To see why, note that an iterate of representing the same homotopy class as an iterate of cannot share the same Conley Zehnder indices, as the equality implies, by (4.11), that . This equality cannot hold because the left hand side is odd while the right hand side is even. So, without loss of generality, suppose both are iterates of . Then we must have that . Again by (4.11), the equality implies and thus .
To prove (b), we suppose . Recall the action formulas (3.1) from Section 3.1:
| (4.12) |
If both project to the same point, then , because the Conley Zehnder index is a non-decreasing function of the multiplicity, and thus, . In the case that project to different orbifold points there are two possibilities for the pair :
4.3.2 Binary dihedral groups
The nonabelian group has elements and has conjugacy classes. For , the conjugacy class of is (see Section 3.2 for notation). Because generates the center, we have . We also have the conjugacy class . The final two conjugacy classes are
Note that is conjugate to if and only if is even. Table 7 records lifts of our three embedded Reeb orbits, and , to paths in , along with the group element satisfying .
| expression | interval | ||
|---|---|---|---|
The homotopy classes of , , and and their iterates are determined by this data and given in Table 8. We now prove Lemma 4.24, the dihedral case of Proposition 4.6.
| Free homotopy/conjugacy class | Represented orbits ( even) | Represented orbits ( odd) |
|---|---|---|
| , for | ||
Lemma 4.24.
Suppose for and .
-
(a)
If then .
-
(b)
If then .
Proof.
We first prove (a). Recall the Conley Zehnder index formulas (3.3) from Section 3.2:
| (4.15) |
By Table 8, there are five possible values of the class :
Case 1: . Then . The Conley Zehnder index modulo 4 of , , or is , 0, or , respectively. Thus, must project to the same orbifold point. Now, because (1) are both type , type , or type , and (2) share a homotopy class, and (4.15) imply , thus .
Case 2: . Then . The Conley Zehnder index modulo 4 of , , or is , 2, or , respectively. By the reasoning as in the previous case, we obtain .
Case 3: for some . If , then by Table 8 and (4.15), we must have such that . This equation becomes . By the bounds on , the ratio is not an integer, and so the quantity on the left hand side is odd, which is impossible. Thus, we must have .
Case 4: . If is even, then both are iterates of , and by (4.15), these multiplicities agree, so . If is odd and project to the same orbifold point, then because their homotopy classes and Conley Zehnder indices agree, Table 8 and (4.15) imply their multiplicities must agree, so . If they project to different orbifold points then , which would imply mod 4, impossible.
Case 5: . If is even, then both are iterates of , and by (4.15), their multiplicities agree, thus . If is odd and project to the same point, then for the same reasons as in Case 4. Thus implies , impossible mod 4.
To prove (b), let . Recall the action formulas (3.4) from Section 3.2:
| (4.16) |
First, note that if project to the same orbifold critical point, then , because the Conley Zehnder index as a function of multiplicity of the iterate is non-decreasing. This implies , because the action strictly increases as a function of the iterate. We now prove (b) for pairs of orbits projecting to different orbifold critical points.
Case 1: . Then . There are six combinations of the value of , whose index and action are compared using (4.15) and (4.16):
-
(i)
and . The inequality implies . This verifies that .
-
(ii)
and . The inequality implies . This verifies that .
-
(iii)
and . The inequality implies . This verifies that .
-
(iv)
and . The inequality implies . This verifies that .
-
(v)
and . The inequality implies . This verifies that .
-
(vi)
and . The inequality implies . This verifies that .
Case 2: . Then . The possible values of and the arguments for are identical to the above case.
Case 3: for and both are iterates of , so (b) holds.
4.3.3 Binary polyhedral groups , , and
We will describe the homotopy classes of the Reeb orbits in using a more geometric point of view than in the dihedral case. If a loop in and satisfy , then the order of in equals the group order of , defined to be the order of any representing . If has order in the fundamental group and is the only class with group order , then we can immediately conclude that . Determining the free homotopy class of via the group order is more difficult when there are multiple conjugacy classes of with the same group order.
Tables 9, 10, and 11 provide notation for the distinct conjugacy classes of , , and , along with their group orders. Our notation indicates when there exist multiple conjugacy classes featuring the same group order - the notation and provides labels for the two distinct conjugacy classes of (for ) of group order . For , and denote the singleton conjugacy classes and , respectively, and denotes the unique conjugacy class of group order .
| Conjugacy class | |||||||
|---|---|---|---|---|---|---|---|
| Group order | 1 | 2 | 4 | 6 | 6 | 3 | 3 |
| Conjugacy class | ||||||||
|---|---|---|---|---|---|---|---|---|
| Group order | 1 | 2 | 8 | 8 | 4 | 4 | 6 | 3 |
| Conjugacy class | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Group order | 1 | 2 | 10 | 10 | 5 | 5 | 4 | 6 | 3 |
Lemmas 4.25, 4.26, and 4.27 allow us to record the homotopy classes represented by any iterate of , , or in Tables 14, 14, and 14. We explain how the table is set up in the tetrahedral case: it must be true that , otherwise taking the 2-fold iterate would violate Lemma 4.26(i) so without loss of generality write and , and similarly and . By Lemma 4.25(i), we must have that , . Taking the 4-fold iterate of provides , and the 5-fold iterate provides , and we have resolved all ambiguity regarding the tetrahedral classes of group orders 6 and 3. Analogous arguments apply in the octahedral and icosahedral cases.
Class Represented orbits Table 12: Reeb Orbits Class Represented orbits Table 13: Reeb Orbits Class Represented orbits Table 14: Reeb Orbits
Lemma 4.25.
We have the following identifications between free homotopy classes represented by orbits:
-
(i)
, for ,
-
(ii)
, for ,
-
(iii)
, for .
Proof.
Suppose , are antipodal, i.e. . Select . The Hopf fibration has the property that in if and only if and are orthogonal vectors in , so and must be orthogonal. Now, is either of vertex, edge, or face type, so let denote the orbit , , or , depending on this type of . Because and are antipodal, the order of equals that of in , call this order , and let . Now, consider that the map
is a lift of to . Thus, is an eigenvector with eigenvalue for some , and because . Because is special unitary, we must also have that is an eigenvector of with eigenvalue . Now the map
is a lift of to . This provides which implies , as both are identified with , and thereby establishing the above identifications. ∎
Lemma 4.26.
The following identifications fail to hold between free homotopy classes represented by orbits:
-
(i)
, for ,
-
(ii)
, for
Proof.
Suppose, for , is one of , , or , and suppose . Let be the order of in , and select for . If modulo and if , then . To prove this, consider that we have with eigenvector in , with eigenvalue so that . Note that implies is not in the same -orbit as in , i.e. . Now, would imply , for some , ensuring that is a eigenvector of . Because , we know that the -eigenspace of is complex 1-dimensional, so we must have that and are co-linear. That is, for some , which implies that
a contradiction. This yields the desired inequivalences.
∎
Lemma 4.27.
The following identifications fail to hold between free homotopy classes represented by iterates of the same orbits:
-
(i)
, for ,
-
(ii)
, for .
Proof.
For , select and let denote one of , , or . Let denote the order of in . Suppose that is not a multiple of , and mod . If is not a multiple of , then . To prove this, consider that we have with . This tells us that is an eigenvalue of . If it were the case that in , then we would have in . Because conjugate elements share eigenvalues, we would have
However, the product of these eigenvalues is not 1, contradicting that . ∎
We are ready to prove Proposition 4.29, which is the polyhedral case of Proposition 4.6. Lemma 4.28 will streamline some casework.
Lemma 4.28.
If and project to the same orbifold critical point and are in the same free homotopy class, then
-
(i)
implies , i.e., ;
-
(ii)
implies , and so .
Proof.
For , , or , fix and let denote one of , , or . Define ; note that this set may potentially be empty. Observe that the map , , is injective. Thus the result holds. ∎
Proposition 4.29.
Suppose for and .
-
(a)
If , then .
-
(b)
If , then .
Proof.
We first prove (a). Recall the Conley Zehnder index formulas (3.5) from Section 3.3:
| (4.17) |
Consider the following possible values of the homotopy class :
Case 1: , , or , so that . By reasoning identical to the analogous case of (Lemma 4.24(a), Case 1), .
Case 2: , , or , so that . Again, as in the the analogous case of (Lemma 4.24(a), Case 2), .
Case 3: , or . If both are iterates of , then by Lemma 4.28(i), they must share the same multiplicity, i.e. . If both are iterates of then again by Lemma 4.28(i), they must share the same multiplicity, i.e. . So we must argue, using (4.17), that in each of these four free homotopy classes that it is impossible that project to different orbifold points whenever .
-
•
If and project to different orbifold points then, up to relabeling,
and . Now, . -
•
If and project to different orbifold points, write
and . Now, . -
•
If and project to different orbifold points, write
and . Now, . -
•
If and project to different orbifold points, write
and . Now, .
Case 4: is a homotopy class not covered in Cases 1 - 3. Because every such homotopy class is represented by Reeb orbits either of type , of type , or of type , then we see that project to the same orbifold point of . By Lemma 4.28(i), we have that .
We now prove (b). Recall the action formulas (3.6) from Section 3.3:
| (4.18) |
Consider the following possible values of the homotopy class :
Case 1: , , or , so that . By reasoning identical to the analogous case of (Lemma 4.24(b), Case 1), .
Case 2: , , or , so that . Again, as in the the analogous case of (Lemma 4.24(b), Case 2), .
Case 3: , or . If both are of type , then by Lemma 4.28(ii), . If both are of type , then again by Lemma 4.28(ii), . So we must argue, using (4.17) and (4.18), that for each of these four free homotopy classes that if and are not of the same type, and if , then .
3.A If , then the pair is either or . If the former holds, then implies , and so
If the latter holds, then implies , and again the action satisfies
3.B If , then the pair is either or . If the former holds, then implies , and so
If the latter holds, then implies , and so
3.C If , then the pair is either or . If the former holds, then implies , and so
If the latter holds, then implies , and so
3.D If , then the pair is either or . If the former holds, then implies , and so
If the latter holds, then implies , and so
Case 4: is a homotopy class not covered in Cases 1 - 3. Because every such homotopy class is represented by Reeb orbits either of type , of type , or of type , then we see that project to the same orbifold point of . By Lemma 4.28(ii), .
∎
References
- [AHNS17] L. Abbrescia, I. Huq-Kuruvilla, J. Nelson, and N. Sultani, Reeb dynamics of the link of the singularity, Involve, Vol. 10, no. 3, Mathematical Sciences Publishers, 2017.
- [BEHWZ03] F. Bourgeois, Y. Eliashberg, H. Hofer, K. Wysocki, and E. Zehnder, Compactness results in symplectic field theory, Geom. Topol. 7 (2003), 799-888.
- [BO17] F. Bourgeois and A. Oancea, -equivariant symplectic homology and linearized contact homology, Int. Math. Res. Not. Volume 2017, Issue 13, July 2017, Pages 3849–3937.
- [CH14] C. Cho and H. Hong, Orbifold Morse–Smale–Witten complexes, Internat. J. Math. 25 (2014), no. 5, 1450040, 35 pp.
- [EGH00] Y. Eliashberg, A. Givental and H. Hofer, Introduction to symplectic field theory, Geom. Funct. Anal. 2000, Special Volume, Part II, 560–673.
- [HM22] S. Haney and T. Mark, Cylindrical contact homology of 3-dimensional Brieskorn manifolds, Algebr. Geom. Topol. 22 (2022), no. 1, 153–187.
- [HWZ96] H. Hofer, K. Wysocki and E. Zehnder, Properties of pseudoholomorphic curves in symplectisations. I. Asymptotics, Ann. Inst. H. Poincare Anal. Non Lineaire 13 (1996), 337–379.
- [HWZ95] H. Hofer, K. Wysocki and E. Zehnder, Properties of pseudo-holomorphic curves in symplectisations. II. Embedding controls and algebraic invariants, Geom. Funct. Anal. 5 (1995), 270–328.
- [Hu02b] M. Hutchings, An index inequality for embedded pseudoholomorphic curves in symplectizations, J. Eur. Math. Soc. 4 (2002), 313–361.
- [Hu09] M. Hutchings, The embedded contact homology index revisited, New perspectives and challenges in symplectic field theory, 263–297, CRM Proc. Lecture Notes 49, Amer. Math. Soc., 2009.
- [HN16] M. Hutchings and J. Nelson, Cylindrical contact homology for dynamically convex contact forms in three dimensions, J. Symplectic Geom. Volume 14 (2016), no. 4, 983-1012.
- [HN22] M. Hutchings and J. Nelson, -equivariant contact homology for hypertight contact forms, J. Topology 2022, (15) 1455-1539.
- [HT09] M. Hutchings and C. H. Taubes, Gluing pseudoholomorphic curves along branched covered cylinders II, J. Symplectic Geom. 7 (2009), 29–133.
- [McK80] J. McKay, Graphs, singularities, and finite groups, The Santa Cruz Conference on Finite Groups, pp. 183-186, Proc. Symp. Pure Math. Vol. 37. No. 183. 1980, AMS.
- [MR] M. McLean and A. Ritter The McKay correspondence via Floer theory, J. Differential Geom. 124 (2023), no. 1, 113–168.
- [MS15] D. McDuff and D. Salamon, Introduction to symplectic topology, 3rd ed., Oxford University Press, 2015.
- [Ne15] J. Nelson, Automatic transversality in contact homology I: regularity, Abh. Math. Semin. Univ. Hambg. 85 (2015), no. 2, 125-179.
- [Ne20] J. Nelson, Automatic transversality in contact homology II: filtrations and computations, Proc. Lond. Math. Soc. (3) 120 (2020), 853-917.
- [Ne1] J. Nelson, A symplectic perspective of the simple singularities, https://math.rice.edu/~jkn3/nelson_simple.pdf, Accessed 7/8/21.
- [NW23] J. Nelson and M. Weiler, Embedded contact homology of prequantization bundles, J. Symp. Geom. vol 21, issue 6, 2023, 1077-1189.
- [NW24] J. Nelson and M. Weiler, Torus knot filtered embedded contact homology of the tight contact 3-sphere, J. Topology 2024, (7) Issue 2, 74 pages.
- [NW2] J. Nelson and M. Weiler, Torus knotted Reeb dynamics and the Calabi invariant, arXiv:2310.18307
- [Sal99] D. Salamon, Lectures on Floer homology, Symplectic geometry and topology (Park City, UT, 1997), volume 7 of IAS/Park City Math. Ser., 143–229. Amer. Math. Soc., Providence, RI, 1999.
- [SZ92] D. Salamon and E. Zehnder, Morse theory for periodic solutions of Hamiltonian systems and the Maslov index, Comm. Pure Appl. Math. 45 (1992), no 10, 1303-1360.
- [Si08] R. Siefring, Relative asymptotic behavior of pseudoholomorphic half-cylinders, Pure Appl. Math. 61 (2008).
- [Si11] R. Siefring, Intersection theory of punctured pseudoholomorphic curves, Geom. Topol. 15 (2011), 2351–2457.
- [Sl80] P. Slodowy, Simple Singularities and Simple Algebraic Groups, Lecture Notes in Math. 815, Springer-Verlag, New York (1980).
- [St85] R. Steinberg, Finite subgroups of , dynkin diagrams, and affine coxeter elements, Pacific Journal of Math. Vol. 118, No. 2, 1985.
- [Wen10] C. Wendl, Automatic transversality and orbifolds of punctured holomorphic curves in dimension four, Comment. Math. Helv. 85 (2010), no. 2, 347-407.
- [We20] C. Wendl, Lectures on contact 3-manifolds, holomorphic curves and intersection theory. Cambridge Tracts in Mathematics, 220, 2020.
- [Wen-SFT] C. Wendl, Lectures on Symplectic Field Theory, to appear in EMS Lectures in Mathematics series, link to version 3, 2021; arXiv:1612.01009v2
- [Za58] H. Zassenhaus, The Theory of Groups, 2nd ed., Chelsea Publishing Company, New York, 1958.
Leo Digiosia
Rice University, PhD 2022
Quantitative Model Development Analyst at US Bank
email: [email protected]
Jo Nelson
Rice University
email: [email protected]